
可拉伸应变传感器对于可穿戴电子产品、假肢和软体机器人等各种应用至关重要,但目前此类传感器主要依赖于可变形导电材料,如橡胶等柔性材料,经过重复使用后,这些材料的特性可能发生不可逆的变化,进而导致变形检测数据不准。
因此制造一种能够大幅度拉伸、快速响应、即使在测量大的动态变形时也能提供精确读数的传感器,是一个极大挑战。而就在最新一起的《科学进展》杂志上,美国南加州大学的研究团队展示了一种新的可拉伸应变传感器结构,有望解决这一难题。

传感器的设计原理和构造
研究人员受到折纸的启发制造了这种传感器,将材料折叠成一个三角形扣在基板材料上,就像是把一本书从中间打开倒扣在桌面上。与基板接触的两边各有一个电极,但其中一个电极是粘合到基板上的,另一个则可以自由移动,电极中间会产生电场并均匀的分布在三角形材料周围,而当传感器受到作用会导致三角形材料的角度变化,其中的电场也会同步发生变化,通过读取这种变化就可以获得变形幅度的具体值。
根据测试,新传感器最多可拉伸至原始尺寸的200%,即使重复使用也具有很高的传感精度(超过700个拉伸循环,100%应变)。此外,该传感器只有1.2%的迟滞度,且响应速度非常快,可在不到22 ms的时间内检测到非常微小区域(约5mm2)的变形,还能检测来自不同方向的应变。
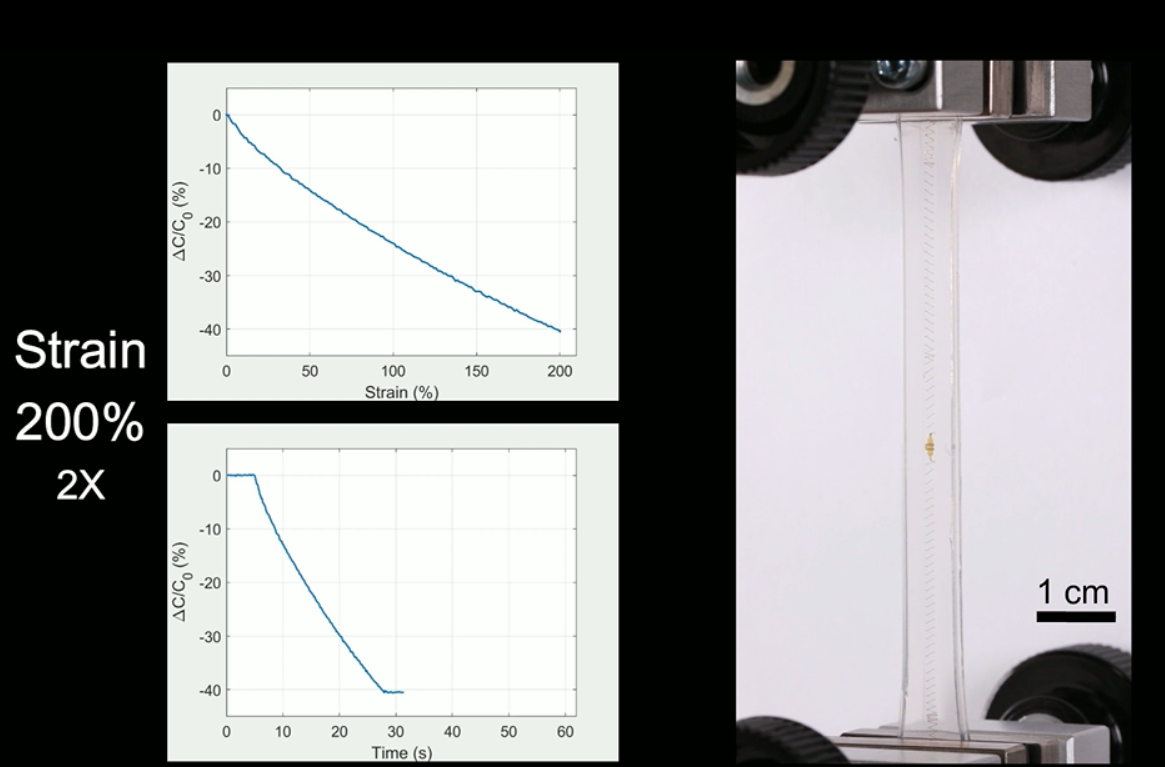
拉伸试验
研究人员表示,此类传感器可准确测量复杂而大量的变形,也可应用于感知柔性机器人的运动、跟踪人体关节的运动,甚至监测膀胱等器官以确定可能预示疾病的异常情况,未来将进一步拓展3D电极设计,从而增加应变范围和应变系数,增强对正常压力和电磁干扰的抵抗力。
 最前沿的电子设计资讯
最前沿的电子设计资讯
