
光学雷达(lidar)就像雷达(radar)一样,是一种用于探测和测距(DAR)的方法。两者都使用与蝙蝠相同的回声定位方法,它们会发射超声波,并根据反射波来探测物体或猎物的位置。雷达使用的是无线电波,而光学雷达则是使用光波。
光学雷达传感器使用一个脉冲激光二极管发出一个光脉冲,如果光脉冲碰到障碍物被反射回来,传感器可以探测到。只要测量飞行时间(ToF),也就是光波发射与接收之间的时间,即可计算出传感器和障碍物之间的距离。
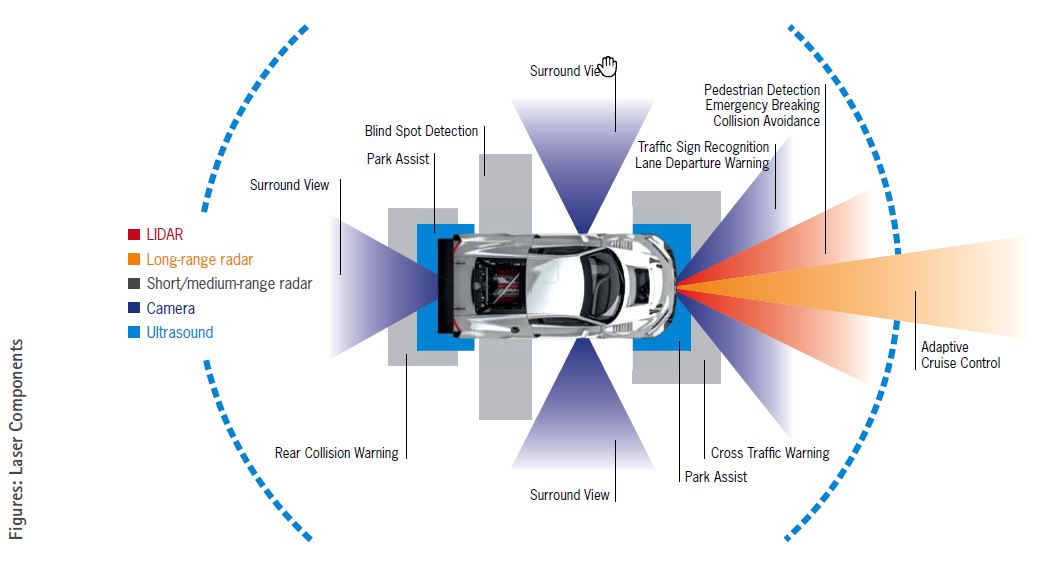
图片:激光组件
根据反射物体或生物的距离和外形,光波会向许多方向散开。这就是为什么探测器的覆盖范围越广阔,所得出的环境测像就越精确,因为可以探测到更多的反射光波。当前的激光雷达传感器使用具有8、12 或 16 个二极管的雪崩光电二极管(APD)阵列。每个二极管代表整个图像的一个像素,这意味着除了阵列的大小之外,二极管之间的距离(等于像素)也会影响传感器分辨率;APD的灵敏度也会产生一定的作用。理想情况下,它们探测到的反射光束痕迹尽可能越少越好。
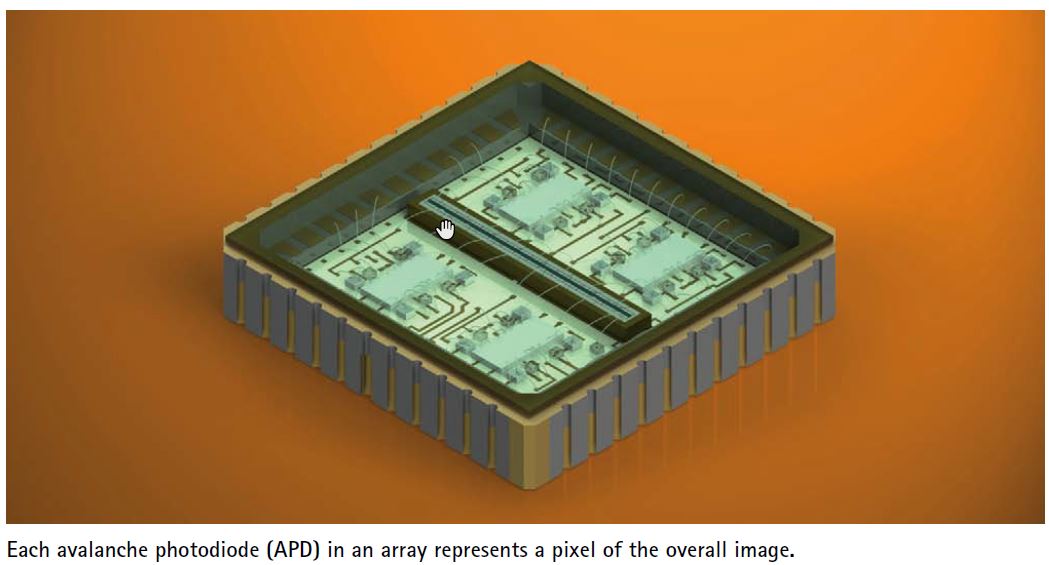
阵列中每个雪崩光电二极管(APD)都代表整体图像的一个像素。
光束的脉冲长度对传感器的分辨率有着极为重要的影响,所以光学雷达制造商投入大量精力开发尽可能短的脉冲长度产品。目前,平均脉冲长度为5ns,最长可达10ns。另一个因素是光束的大小,由于激光二极管发出的光束非常聚集,它只能测量相同大小的点的距离。如果要用于驾驶员辅助系统是远远不足的,当然也就无法用于自动驾驶的汽车上。业界有多种用于扩大扫描视野(field of view, FOV)的解决方案,所面临的挑战是如何在大范围FOV中也能探测到最小的人脸。
光学雷达发展的一个限制因素是眼睛的安全。考虑到激光束可能会照射到人的视网膜,尤其是用于道路交通时,确保其不会对眼睛造成伤害是很重要的。人的皮肤也可能受到激光束的损害。激光监管标准EN 60825-1根据其对眼睛和皮肤的危害,定义了各种级别,而且与波长和脉冲长度都有关系。现有三个示例可说明激光级别。第1类是属于无危害或在封闭体中使用的激光辐射;第2类是属于400到700nm之间可见光谱范围内的激光辐射,曝光时间短(最长为0.25秒),对眼睛没有危害。第4类激光即使是散射的,对眼睛和皮肤都有严重危害。
一种扩大FOV的方法是利用散射光束,通过宽广的光束角来扩大FOV范围。这被称为“快闪光学雷达(flash lidar)”,使用散射光,而且相比聚焦的光束弱得多。即便如此,为了实现远距离和高分辨率探测,仍然使用输出功率非常高的1-2kW激光二极管。
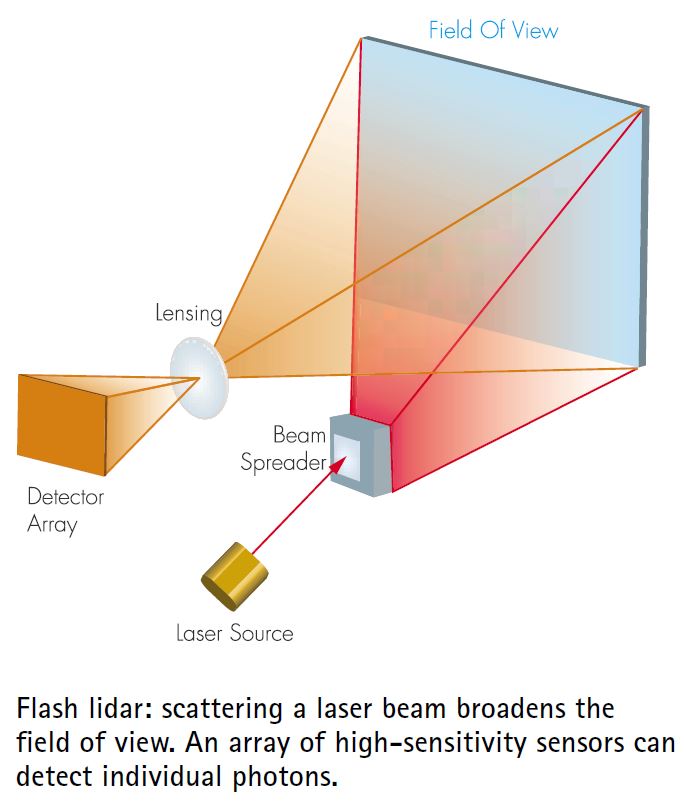
快闪光学雷达︰散射的雷达光束可扩大扫描视野,高灵敏度传感器阵列可探测单个光子。
对于只需要在短距离内探测物体的应用,波长介于850至940nm之间的垂直腔面发射激光二极管(VCSEL)是理想的选择。它们可以用于功能强大的二维阵列。对于探测器来说,可侦测到单个光子的高敏感度传感器效果更好,称为“单光子雪崩二极管(SPAD) ”。为了提高射程并考虑强烈阳光照射的情况,德国佛劳恩霍夫研究机构(Fraunhofer Institute)开发了用于微电子电路和系统的CMOS SPAD探测器。将SPAD整合到CMOS工艺中,该工艺制程通过了汽车产业的认证,并针对光电应用进行了优化,可以生产具有高达108瞬时放大、高脉冲率和低噪声特性的高灵敏度、超快速雪崩光电二极管产品。
Laser Components公司提供内置CMOS SPAD的快闪光学雷达传感器SPAD2L192,它是一款用于快闪光学雷达应用的192×2像素固态CMOS传感器,根据首光子、dToF(direct-ToF)原理来测量距离。单光子探测器可提供非常高的灵敏度和时间分辨率,像素内部的“时间至数值转换器(TDC)”的时间分辨率为312.5ps,刻度终点值为1.28μs,可实现192米的标称范围和4.7厘米距离的分辨率。
为了保持光的强度,同时覆盖较大范围FOV,扫描光学雷达技术采用了以光束“扫描”场域的原理。利用内部微小镜面的旋转,将光束引导到视野范围内进行扫描。扫描式光学雷达传感器通常使用1至16个激光二极管,波长为905nm的边射型激光能产生最好的结果,而超过100W的高功率激光二极管则可实现最长150米的范围。
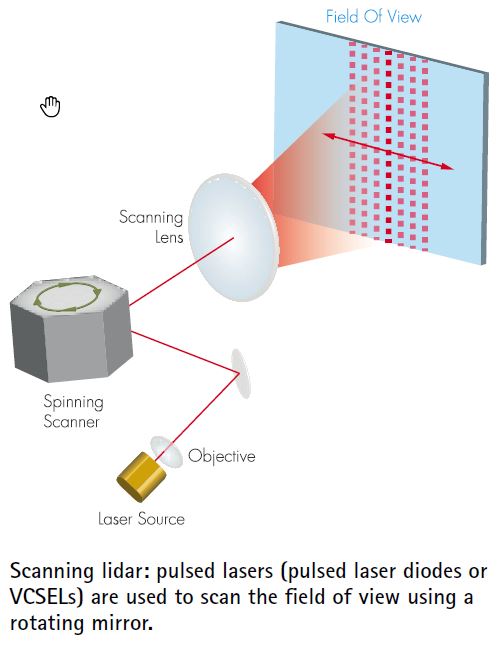
扫描式光学雷达:脉冲激光(脉冲激光二极管或VCSEL)使用旋转镜面来扫描视野。
扫描式光学雷达传感器只需要几个功率相对较低的二极管就足够了,因此具有良好的散热性能。这样可以实现非常高的脉冲率,即使在采用905nm波长的情况下,也能保证眼睛的安全。
FOV通常在y轴上是145°,在Z轴上是3.2°。理论上,这项技术应该可以实现360°全景扫描,但在实践中确实容易出现“盲点”(光束无法扫描到的邻近之处),不过还有其他的雷达和摄影机方案能弥补这项缺陷。可是,由于扫描式光学雷达传感器的尺寸和稳健性较差,并不适合用于车辆应用。例如,它们的尺寸约为10.5cm x 6cm x 10cm,由于尺寸太大,无法安装用于聚光灯等装置。微动镜面对于车辆中无法避免的振动、冲击、灰尘和极端温度也很敏感。
Laser Components公司提供了合适的二极管905DxxUA系列,包括具有单接面(single-junction)和多接面(multi-junction)设计的脉冲激光二极管,激光输出功率高达110W,波长为905nm。这些组件绝对可靠,在密封封装中能提供出色的散热稳定性和非常精确的芯片对位。因而适用于距离测量和障碍物探测、测量设备、光学雷达和多种医疗应用。符合AEC-Q101认证标准的型号还可用于汽车应用。
探测器最好使用Si-APD或Si-APD阵列。Laser Components公司提供的SAHA系列Si-APD,针对850nm和905nm之间的波长进行了优化。这些半导体材料具有特别高的效率,而脉冲激光二极管在此波长下也会发光。在微型SMD封装中,Si-APD提供高量子效率,因此具有高灵敏度和低噪声。SAH1Lxx阵列系列有8、12、16个高灵敏度Si-APD,采用LCC-44封装,带有保护窗,具有相同的特性。它们提供了特别低的40µm间距,具有12个APD的阵列也可采用14引脚DIL封装。除了标准阵列之外,还提供具有特定数量和尺寸大小的定制化APD阵列。
固态光学雷达传感器是一种更小且更强大的替代方案。这些传感器仰赖半导体而非机械组件来引导光束,其中有两个方案版本:一个是采用微机电系统(MEMS)模式的镜面方案,另一个是采用光学相控阵列(OPA)模式的方案。
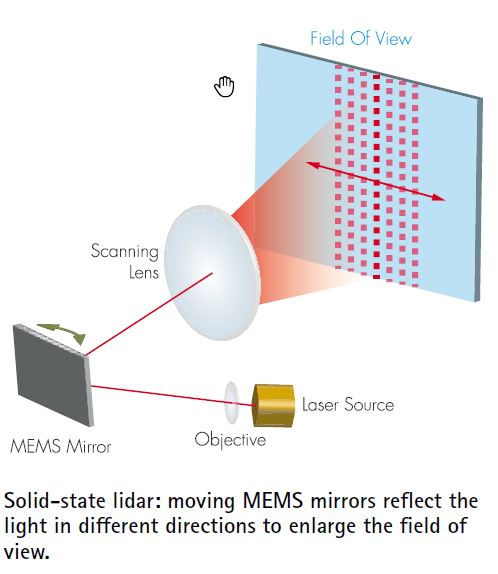
采用MEMS模式镜面的光学雷达使用微镜面矩阵,每一个镜子的边缘长度只有几微米,它们受到静电场的推动,每秒种可在两个位置之间来回切换几千次。这些类型的光学雷达已经用在扫描仪检查或数字光处理(DLP)投影仪等应用,是一种通过验证和测试的技术,生产成本相对较低。
然而,用于汽车应用的传感器则需要符合更严苛的要求。例如,与POS结账系统或投影仪应用相比,汽车需要更大范围FOV。由于扫描频率超过100Hz,目前的解决方案可提供40°角度,业界正在开发具备更大角度的MEMS系统方案。
至于使用OPA的光学雷达,每个激光二极管发出的光相位会通过调制器进行调节,以使脉冲能够覆盖更大的区域。这项技术目前仍处于研究阶段,其中一个型款是采用一个只有几平方毫米的硅电路来替代旋转发射器和探测器单元。为了获得更高的输出和更大范围的FOV,目前正以比一般所用的905nm更长的波长进行测试。举例来说,1550nm波长对眼睛无害,但可能会受到下雪或雨天的不利影响,因此还需要搭配其他探测器来使用。
我们还需要数年时间才能实现科幻电影中描述的自动驾驶,但无论是自适应巡航控制系统(ACC)、紧急制动辅助系统(EBA)或车道偏离警告系统(LDW),每一项辅助系统都是通往这个目标所迈出的一步。对于许多技术系统而言,光学雷达是一个必不可少的组件,而且必需与其他技术配合使用,例如超声波传感器、摄影机和雷达解决方案,因为每项技术都各有其优势和劣势。
 最前沿的电子设计资讯
最前沿的电子设计资讯
