
设计人员可在三个轴或更多轴上对机械手进行编程,从而指定机器人(机械手臂或本体)的运动。这些机械手无需进行物理修改即可实现自动控制和重新编程,并且可以适应控制系统的不同应用。工业系统最初设计用于处理恶劣或人迹罕至的环境中的应用,如今它们变得越来越复杂,并集成了机器人,因此能够以比人类更精确和更快的方式执行许多以前的手动操作。
机器人系统主要由四个子系统组成:机械、执行器、测量和控制。一个关键挑战是,关节运动控制对低速和高扭矩的要求,与有效利用伺服电机的机械特性相悖——后者在最佳操作条件下将会产生高速和低扭矩。
因此,驱动单元的功能是确保电机和负载的速度和扭矩兼容,并能够将机械扭矩从一个转移到另一个。传动部件还可以通过将电机放置在机器人底座上来减轻机械结构的重量,从而提高静态和动态性能。
关节运动采用电机实现,可使机械结构获得所需的运动。在永磁电机、直流(有刷)电机和电子换向(无刷)电机这三种关键类型中,最能优化低惯性和高定位精度要求的是无刷直流电机(BLDC)(图1)。
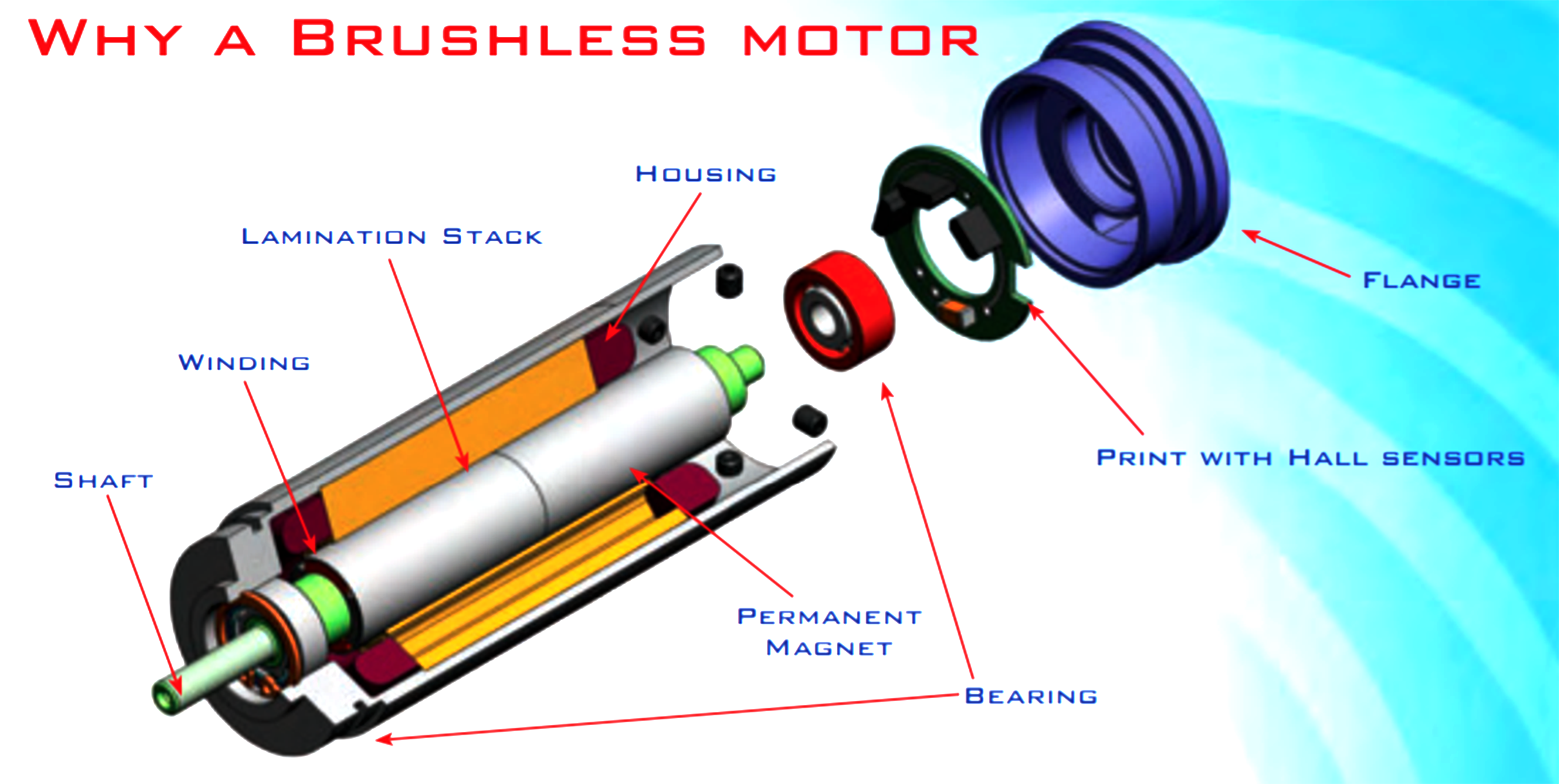
图1:无刷直流电机图解。(图片来源:Portescap)
与采用机械换向的有刷电机相比——有刷电机当中采用带电刷的旋转电枢实现电气连接——BLDC没有机械换向。
运动部件的减少可使无刷电机的使用寿命更长,这样其使用寿命就仅受滚珠轴承磨损的限制。此外,绕组也改善了散热和过载能力,因此与其他直流解决方案相比提供了更高的效率。
由于没有电刷,BLDC还具有出色的耐用性和低噪声特性。其主要有两种结构类型:表面永磁体(SPM)和内部永磁体(IPM)。SPM电机的磁铁附在转子表面的外部。相反,IPM电机则将永磁体嵌入转子本身。
BLDC可提供高效率,但最重要的是,能提供许多应用中所需的出色的扭矩值和速度值。它们使用带有旋转电枢的固定磁铁,当中结合了各种部件提供电子换向。
BLDC的设计旨在优化扭矩,扭矩代表电机的旋转力大小,它与磁铁和线圈绕组有关。磁体中的极对数越多,电机转矩就越大。
一个例子是Portescap公司的Ultra EC平台,它由三个系列组成——ECS、ECT和ECP。根据扭矩和速度要求,这些无刷微型电机系列可用于各种应用。获得专利的U型线圈可提供最小的铁损,从而提供良好的效率和更冷的操作(图2)。

图2:Portescap的Ultra EC电机。(图片来源:Portescap)
Maxon Motor公司的EC-i无刷电机提供小直径尺寸,适用于机器人应用。其直径为30mm,具有高动态和高扭矩的特性。
EC-i系列有多种尺寸可供选择,每种都有标准版和高扭矩版,在75W时最大额定扭矩高达110mNm。在所有版本中,EC-i30电机都可以扩展提供编码器、齿轮箱、伺服控制器或定位控制器(图3)。
图3:Maxon Motor的EC-i电机。(图片来源:Maxon Motor)
意法半导体(ST)公司和Maxon公司合作开发了一种新套件,用于加速机器人和工业应用的设计。EVALKIT-ROBOT-1套件可在机器人应用中提供精确定位。
该套件包含ST的STSPIN32F0A智能三相控制器和完整的逆变器级,内置ST功率晶体管,可连接到电机。STSPIN32F0A包含关键的电机控制电路,包括一个STM32F031C6微控制器(MCU)和一个采用7mm×7mm VFQFPN小尺寸封装的三相逆变器驱动器(图4)。
电机控制固件使设计人员可以启动引擎并开始发送命令,从而轻松优化他们的项目。该套件包括一个100W Maxon BLDC电机(EC-i 40),内置1024脉冲增量编码器。还包括用于转子位置检测的霍尔传感器。

图4:ST EVALKIT-ROBOT-1开发套件。(图片来源:ST)
BLDC电机非常高效,但为了满足日益严格的要求,公司不仅要改进电机的结构,还要改进驱动器的结构。特别是,他们正在努力降低整体能源消耗并优化散热管理。
在许多情况下,这些设计包含可最大限度减少所需外部元器件数量的集成驱动器和可实现高集成度的片上系统(SoC)解决方案。好处包括节省空间和能源、提高整体系统可靠性和降低成本。
由于BLDC没有以机械方式切换电流方向的结构,因此必须以电子方式完成。波形可分为两种主要类型:梯形波和正弦波。由于温度限制和成本,有时不使用传感器,而是根据三相电流或感应电压估计转子(磁铁)的位置。
驱动器必须确保正确的电机控制,以便能在应用中相应地控制速度和方向。在为直流(和交流)电机开发高效控制回路方面,现代MCU非常适合提供所需的性能水平和计算功能。
许多MCU支持信号处理功能,借此就可使用定位数据实时处理复杂的算法。这很重要,因为越来越多的应用正试图消除提供定位数据的传感器。有许多MCU具有专为电机控制应用设计的外设。
例如,瑞萨电子的RL78/G14 MCU对电流消耗水平和低漏电水平进行了平衡(CPU运行时为66μA/MHz,待机或STOP模式下为240nA),可提供51.2DMIPS(32MHz)的高计算性能。集成的安全功能支持家用电器的安全标准IEC/UL 60730。
在BLDC电机中,驱动器也变得更加复杂。速度和扭矩由瞬态的开/关持续时间比控制;通常,这会采用驱动绕组所用的PWM信号的形式。这种情况因使用单相、两相和三相电机而变得更加复杂。今天,有许多集成器件都可用作驱动级。通常,它们包括栅极驱动器,可以驱动用于激励多达三相电机的外部功率MOSFET。
电机需要大量电流,但控制器电路却在小电流信号上运行。因此,电机驱动器的作用就是把小电流的控制信号转换成可以驱动电机的大电流信号。
英飞凌(Infineon)公司提供了各种用于控制变速驱动器的集成产品。iMOTION IC集成了无传感器磁场定向控制(FOC)所需的所有控制和模拟接口功能。此外,它们还采用了该公司经过验证的电机控制引擎(MCE)算法,从而消除了控制协议开发过程中的软件编码。
另一个节省空间的是德州仪器(TI)的智能栅极驱动器。这类驱动器集成了无源元件,可减少电路板尺寸、元件数量、复杂性和设计成本。它们还使设计人员能够优化开关和电磁干扰(EMI)性能。
在其广泛的驱动器产品组合中,TI为DRV8313提供了三个可单独控制的半H桥驱动器。该器件设计用于驱动三相无刷直流电机,但也可用于驱动螺线管或其他负载。集成比较器可以构建限流电路或其他功能。
另一个例子是东芝(Toshiba)电子元件及存储装置株式会社具有闭环速度控制功能的TC78B025FTG无刷三相电机驱动器IC。该器件采用4.5V至16V电压范围的电源工作,可提供具有150°开关的正弦驱动。0.2Ω(典型值)的低导通电阻降低了IC在工作期间的自发热,从而扩展了对大驱动电流的支持。
一般来说,电机设计人员都知道必须符合国际绝缘标准,从而防止外部干扰并确保用户的电气安全。数字隔离的使用提供了几个好处,包括更快的响应速度,这样就能集成过流保护并减少停机时间。这提供了更渐进的输出电压变化,从而改善了扭矩控制。
由于光耦基于光电技术,因此是一种非常可靠的方法,可确保在没有任何物理接触的情况下实现电气隔离。与基于使用继电器等机电元件的传统方法相比,这提供了许多优势。主要优点包括无磨损运行、互补元器件成本相对较低、电路板空间最小、抗电磁干扰、高可靠性和长使用寿命。
在电机驱动应用中,电路的两个主要部分需要隔离:桥式逆变器中绝缘栅双极晶体管(IGBT,这种器件一侧具有集电极和发射极,另一侧则由栅极进行驱动)的栅极驱动,和电机中的电流相位检测。相电流检测可为IGBT提供保护并为控制器提供反馈,从而保持对闭环电流的控制。
以下是一些可用于机器人应用的光耦示例:
瑞萨电子(Renesas)的RV1S92xxA和RV1S22xxA光耦,封装长度仅为2.5mm,与类似器件相比,PCB面积减少了35%,因此有助于设计人员减小机器人系统的尺寸。由于增强绝缘,RV1S92xxA和RV1S22xxA可使200V和400V的系统超过安全标准。所有器件均符合严格的UL61800-5-1电机控制标准,以及适用于PLC等控制系统的UL61010-2-201标准(图5)。
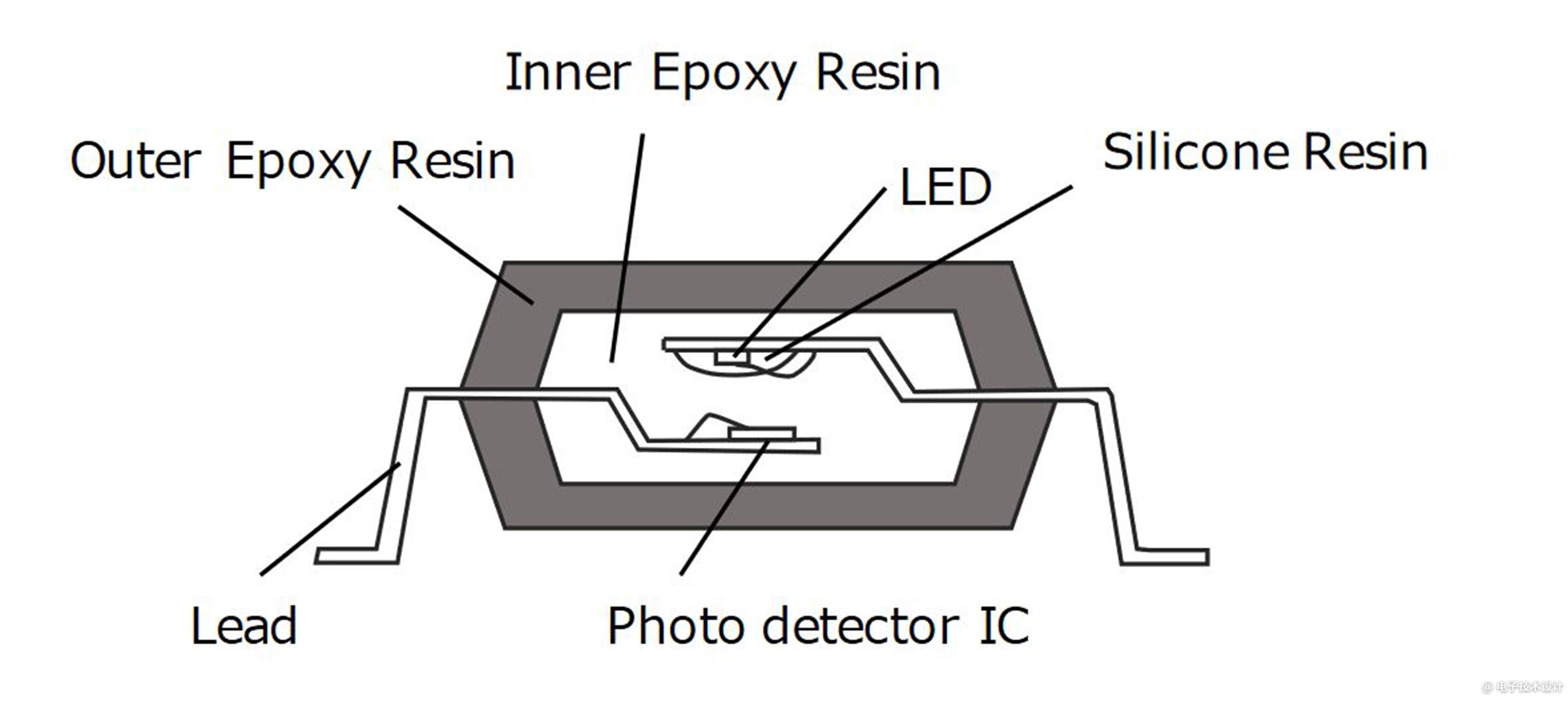
图5:瑞萨电子RV1S92xxA和RV1S22xxA的横截面图。(图片来源:瑞萨电子)
Toshiba的TLP5214是一款高度集成的4A输出电流IGBT栅极驱动光耦,它采用SO16L封装。TLP5214具有先进的内置功能,例如IGBT去饱和检测、隔离故障状态反馈、软IGBT关断、有源米勒阻断和欠压阻断(UVLO)。它适用于对逆变器应用中使用的IGBT和功率MOSFET进行驱动。
无论电机是用于工业还是非工业操作环境,具有精确定位能力的高端运动控制设计都很复杂,需要极其可靠的驱动解决方案和优化的机械结构。
近年来,电机也与无人机和农业4.0等新兴机器人应用相关联,得益于快速原型制作、专用操作系统和集成控制系统等新制造系统,这些应用得到了加速发展。
(原文刊登于EDN姊妹网站Electronic Products,参考链接:Designer's guide to high-performance motor control for robotics,由Franklin Zhao编译。)
本文为《电子技术设计》2022年8月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。
 最前沿的电子设计资讯
最前沿的电子设计资讯
