
前言
永磁电机作为机器人的重要组件,起到为机器人提供动力的作用,高扭矩的电机可以提升机器人的负重能力,而高转换效率则意味着机器人的电池续航时间更长。充电头网拿到了小米推出的CyberGear微电机,这款电机适用于机器人,桌面级机械臂和人形外骨骼应用。
这款电机采用减速器,电机和驱动器一体设计,具有强劲的动力持续输出,自研的温度检测系统和保护算法,保护电机运行更加安全可靠。电机采用快拆设计,便于DIY使用和快速维护。下面就带来小米CyberGear微电机的拆解,一起看看内部的设计和做工。
小米CyberGear微电机外观

小米CyberGear微电机采用黑色铝合金外壳,中心圆盘为电机输出轴。

电机壳体边缘设有固定开孔。
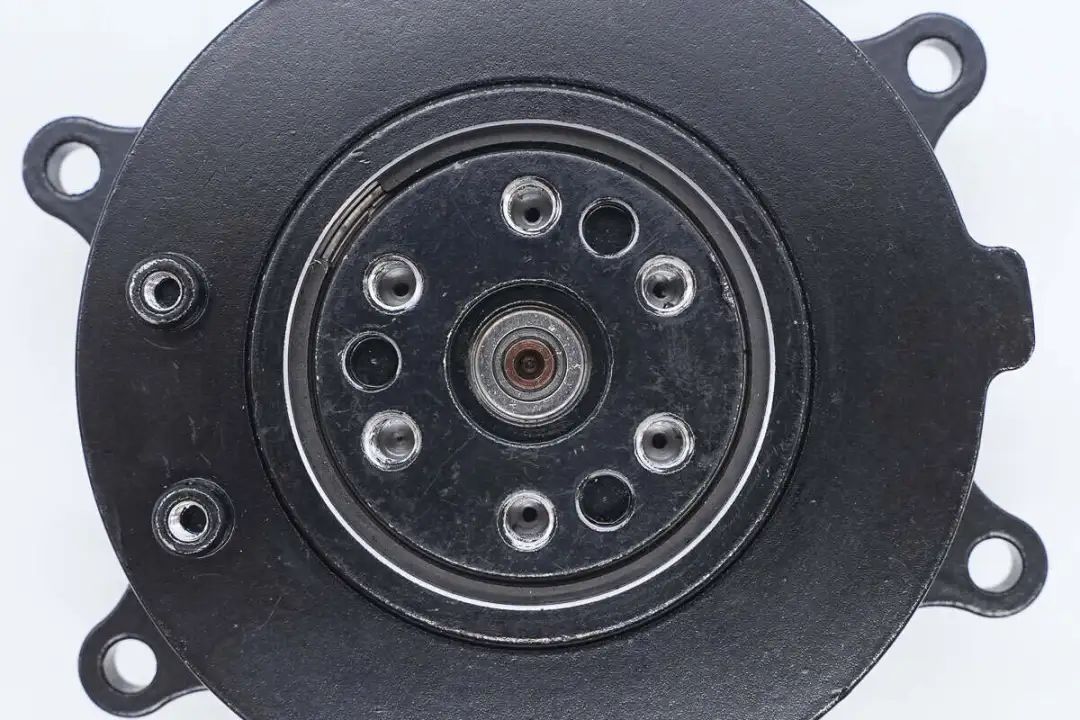
电机输出轴设有六个固定螺丝孔。

用于固定电机的螺丝孔特写。

电机外壳的固定开孔特写。

电机背面设有塑料盖子,通过螺丝固定,并粘贴信息标签。
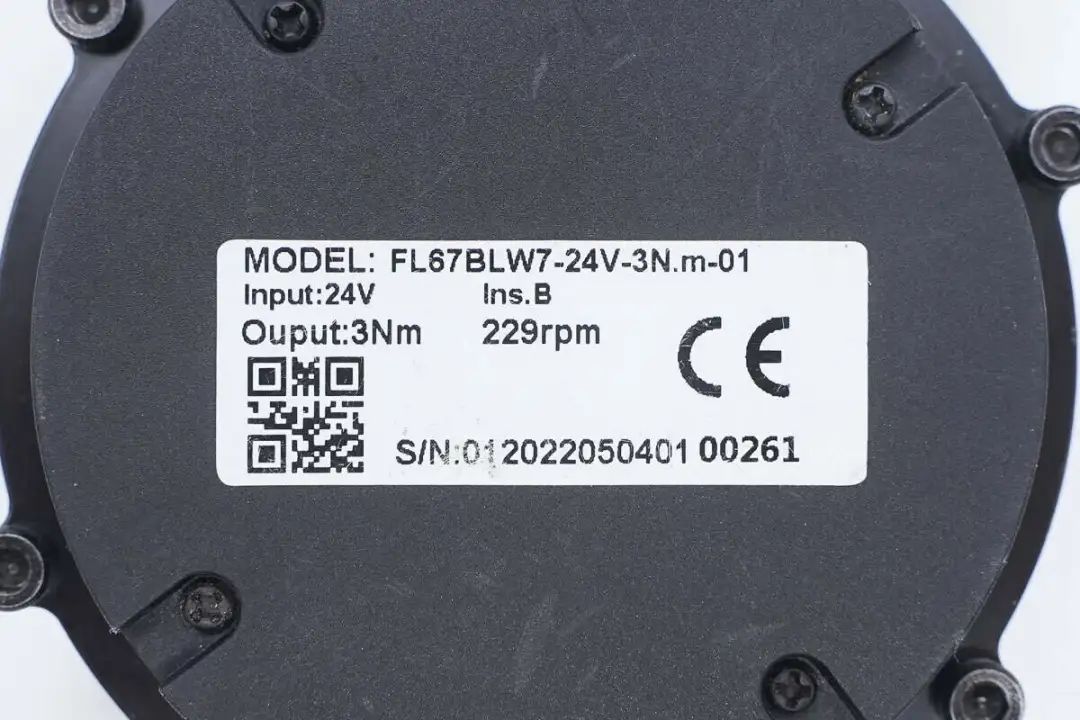
电机型号:FL67BLW7-24V-3N.m-01
输入电压:24V
输出:3Nm 229rpm

电机壳体固定螺丝特写。

电机侧面设有连接器,采用XT30-2+2接口。

测得电机直径约为71.6mm。

电机厚度约为36.3mm。

产品拿在手上的大小直观感受。

测得电机重量约为297g。
小米CyberGear微电机拆解
看完了小米这款电机的外观展示,下面就进行拆解,一起看看内部的设计和做工。

首先拧下后盖的固定螺丝,拆开电机后盖。

内部设有PCBA模块,通过螺丝固定。
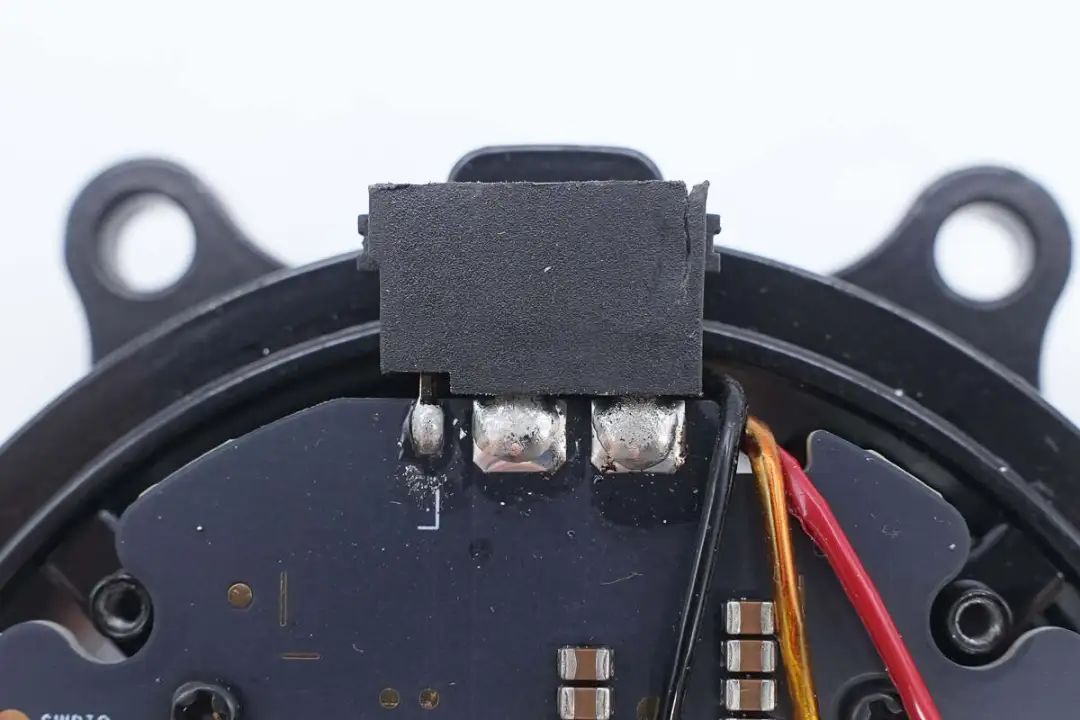
输入端XT30插座通过焊接连接。

在电机外壳设有NTC热敏电阻,用于检测温度。
电机定子线圈引出线焊接连接到PCBA模块。

焊接分开电机定子线圈与PCBA模块的连接,分开电机与PCBA模块。
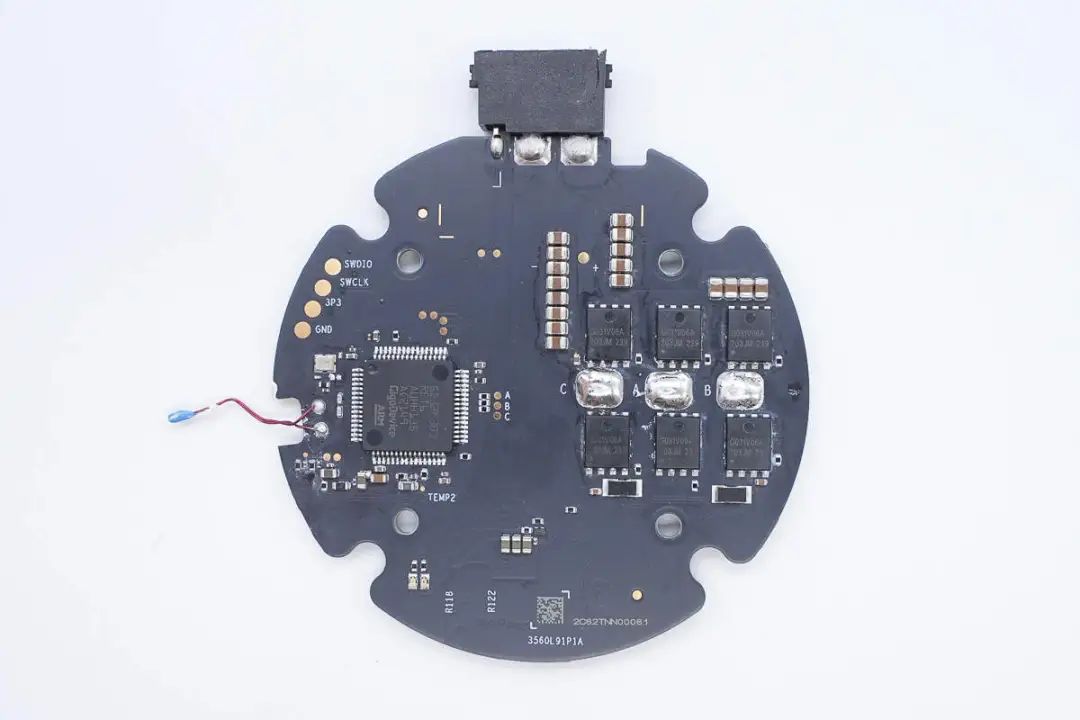
PCBA模块正面一览,左侧设有主控MCU,下方设有LED指示灯,右侧设有六颗用于电机驱动的MOS管以及MLCC电容。
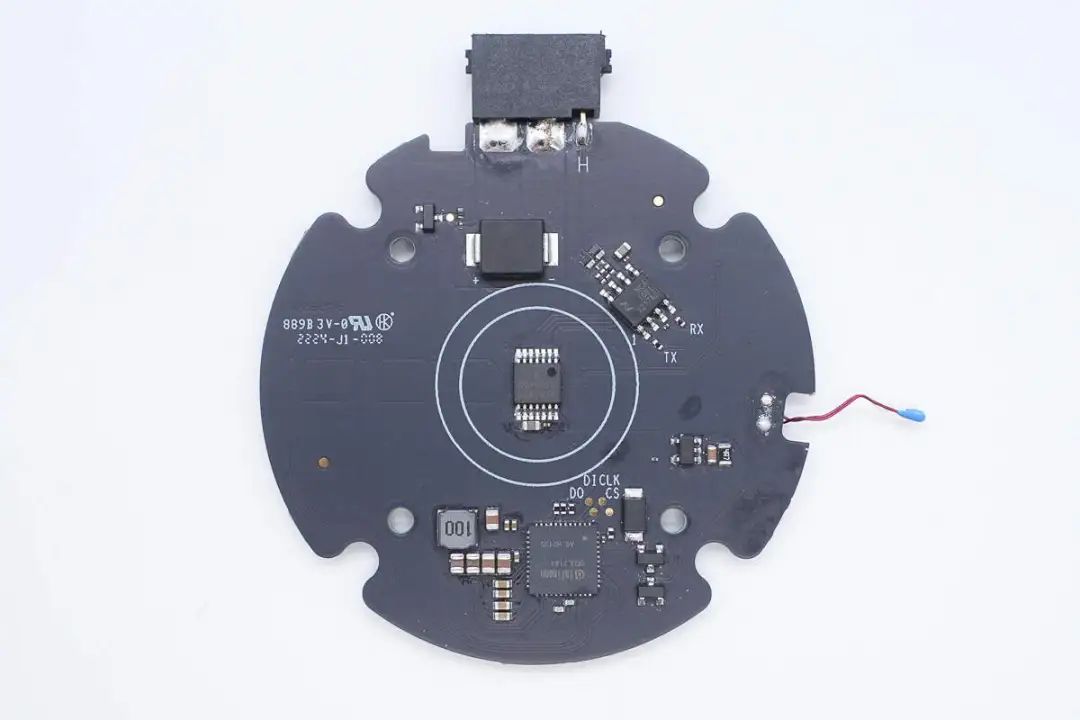
PCBA模块背面设有TVS二极管,CAN收发器,中间位置设有磁编码器,下方设有电机驱动芯片。
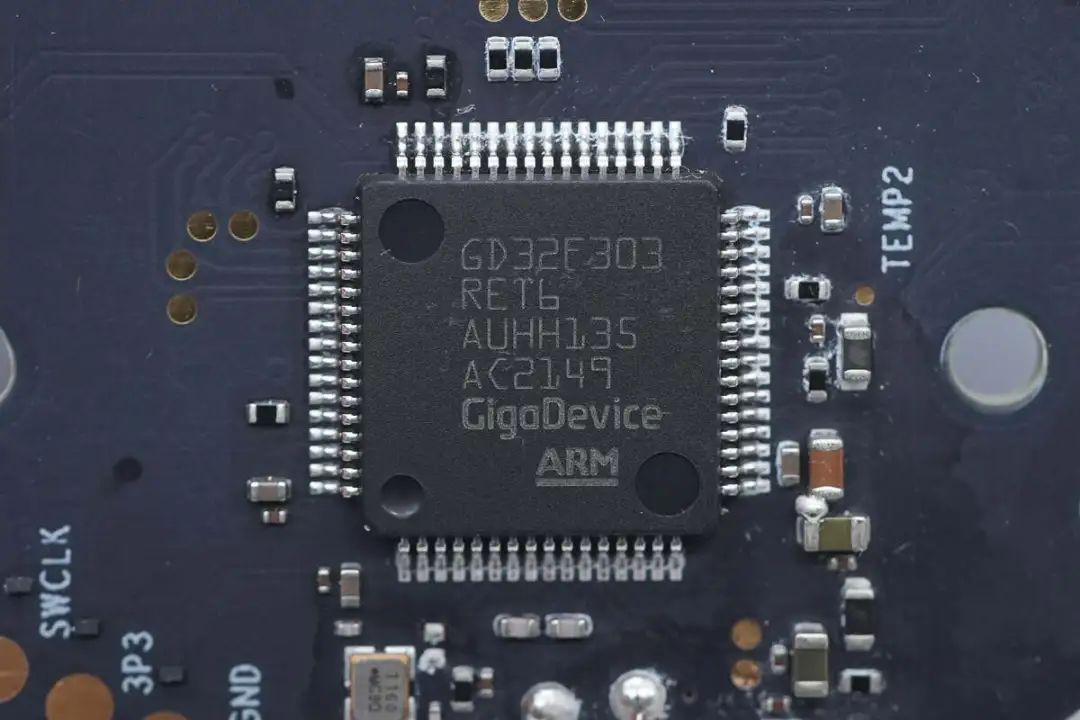
主控MCU来自兆易创新,型号GD32F303RET6,内置ARM Cortex-M4内核,主频120MHz,内置512KB Flash和64KB SRAM,采用LQFP64封装。

MCU外置时钟晶振特写。
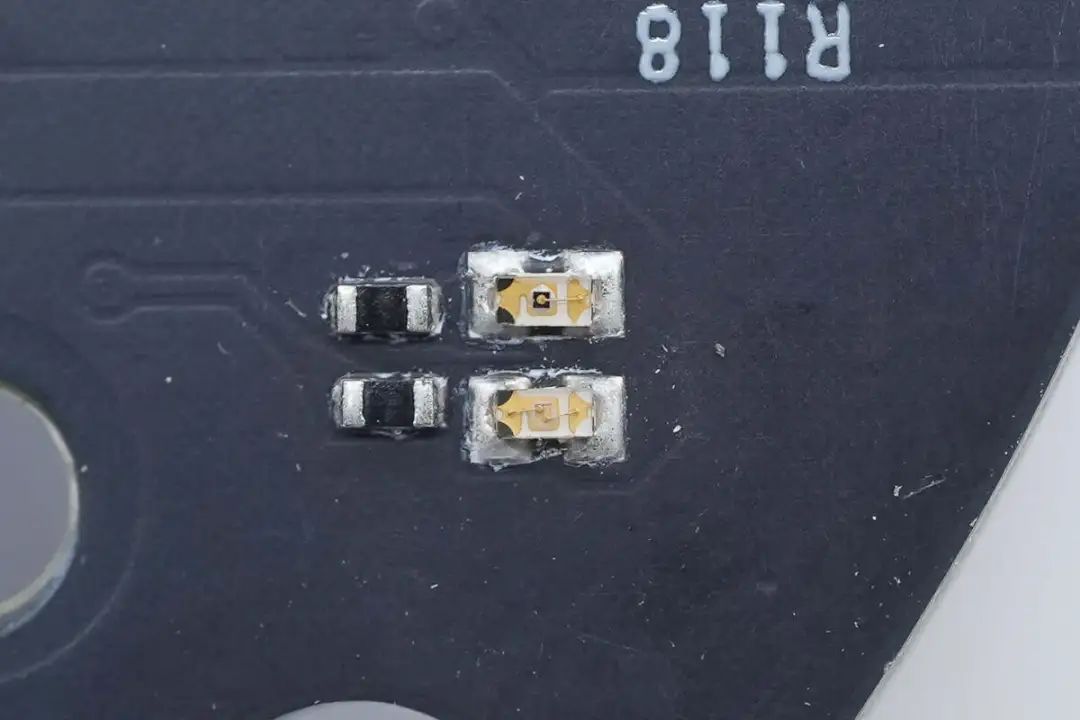
两颗贴片LED指示灯特写。

线性稳压芯片来自豪威,丝印WS33,型号WL2803E33-5,支持5.5V输入电压,输出电压3.3V,输出电流500mA,采用SOT-23-5L封装。

热敏电阻用于检测电机外壳温度。
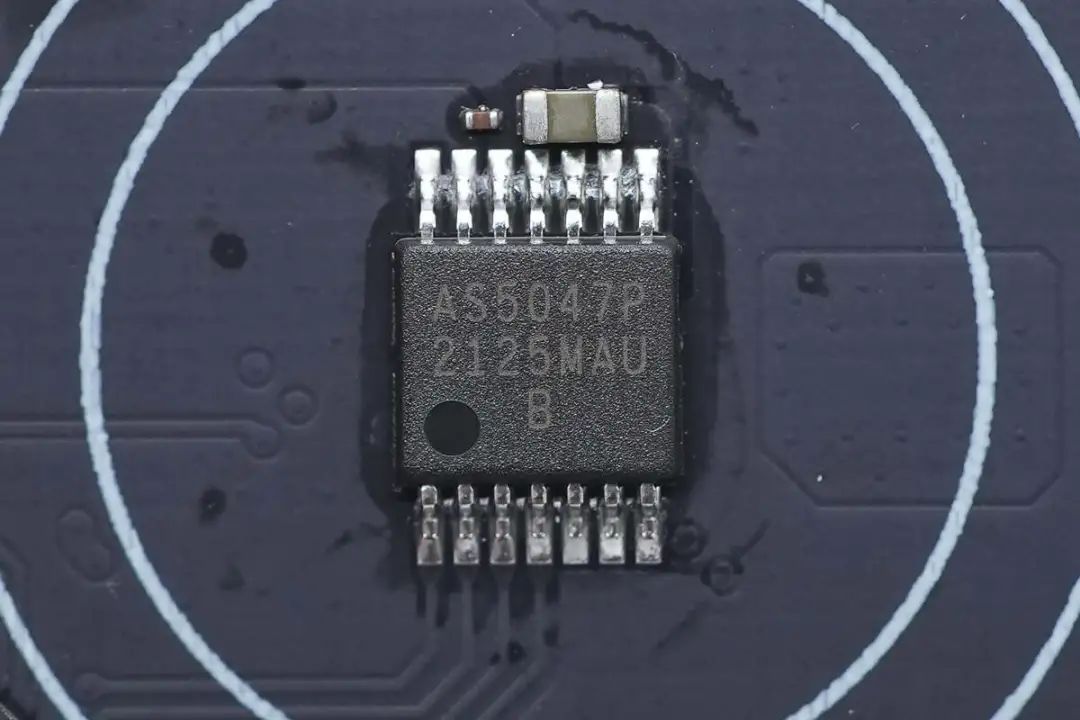
磁编码器来自艾迈斯半导体,型号AS5047P,是一颗14位高精度的磁编码器,使用SPI通信接口,采用TSSOP14封装。
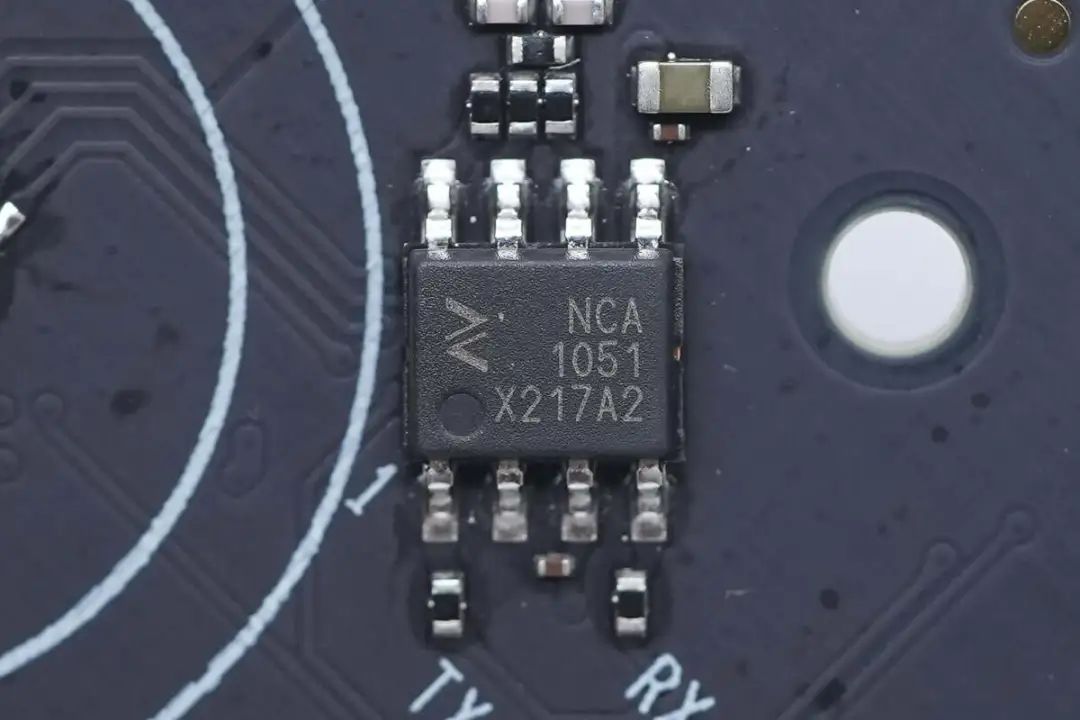
CAN收发器芯片来自纳芯微电子,型号NCA1051,是一颗高速CAN收发器,符合ISO11898-2标准,支持3V和5V MCU使用,具备过流和过热保护功能,传输速率高达5Mbps,采用SOP8封装。
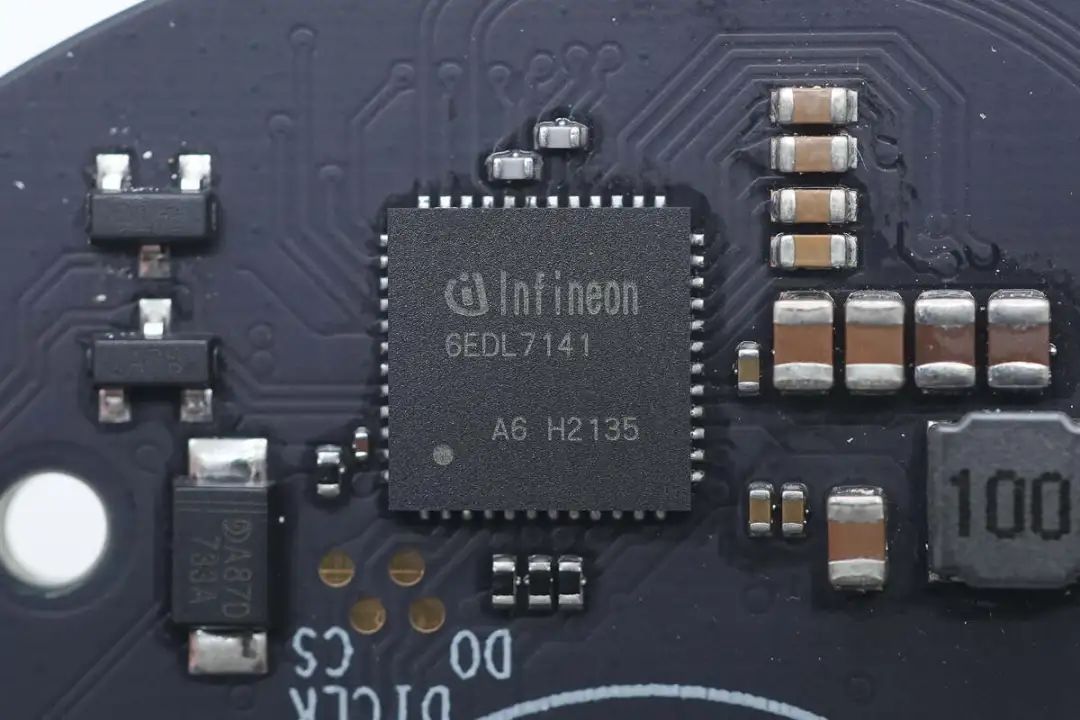
电机驱动芯片来自英飞凌,型号6EDL7141,用于三相无刷电机驱动。芯片支持5.5-60V工作电压,内置的驱动器支持1.5A输出电流,且输出电压可编程调节,具备独立的高侧和低侧压摆率控制,具备独立的死区时间设置。芯片集成完整的电机控制保护套件,采用VQFN-48封装。
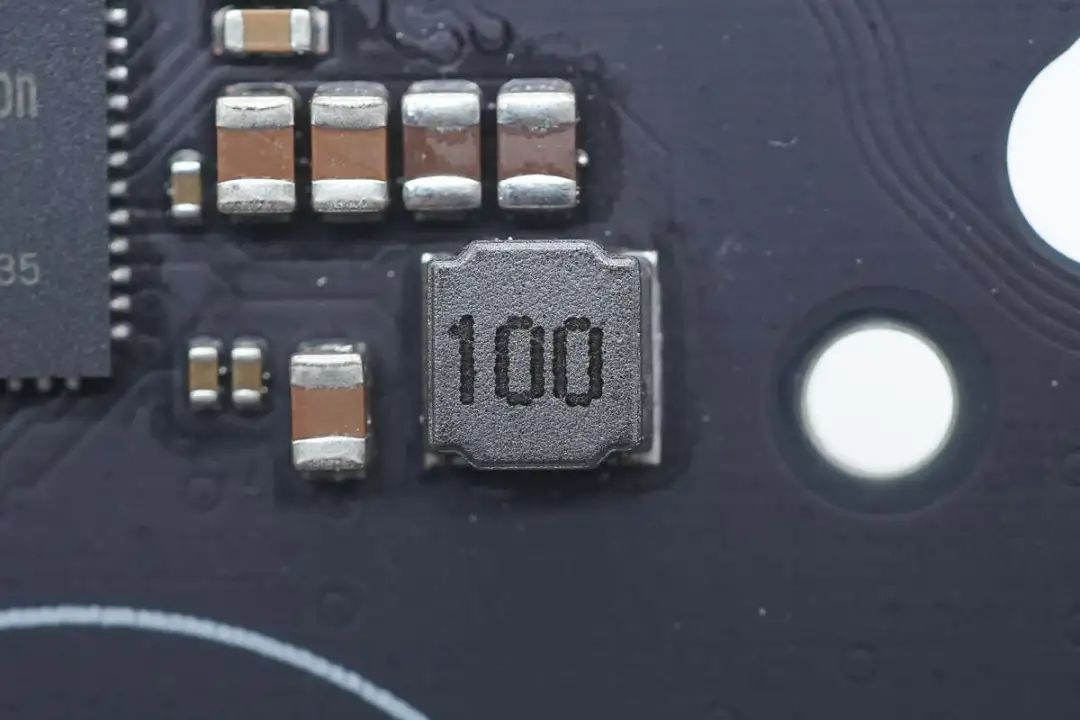
芯片外置的10μH降压电感特写。
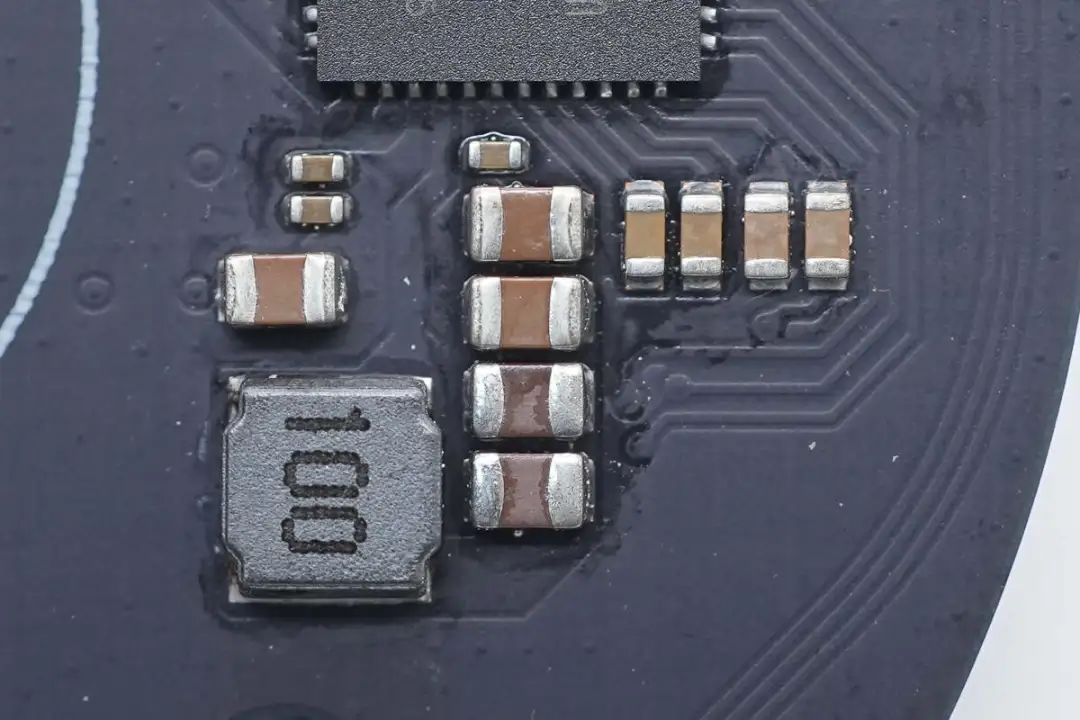
MLCC滤波电容特写。
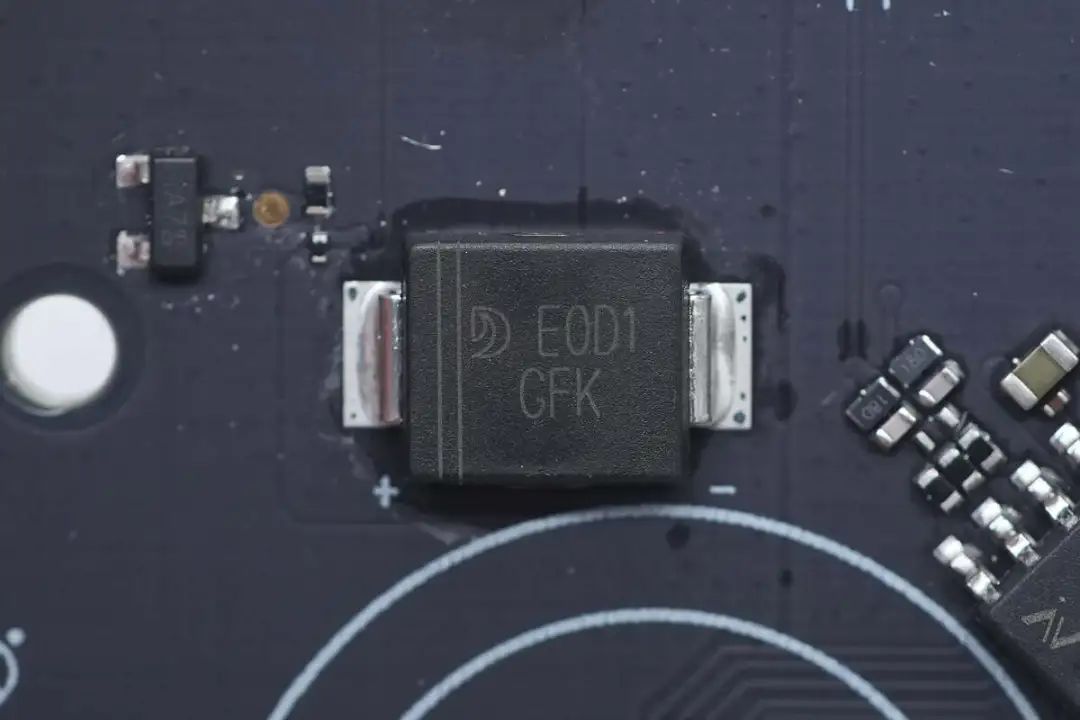
输入端TVS二极管来自迪一电子,丝印GFK,型号SMCJ30A,工作电压30V,用于吸收过压浪涌,采用SMC封装。
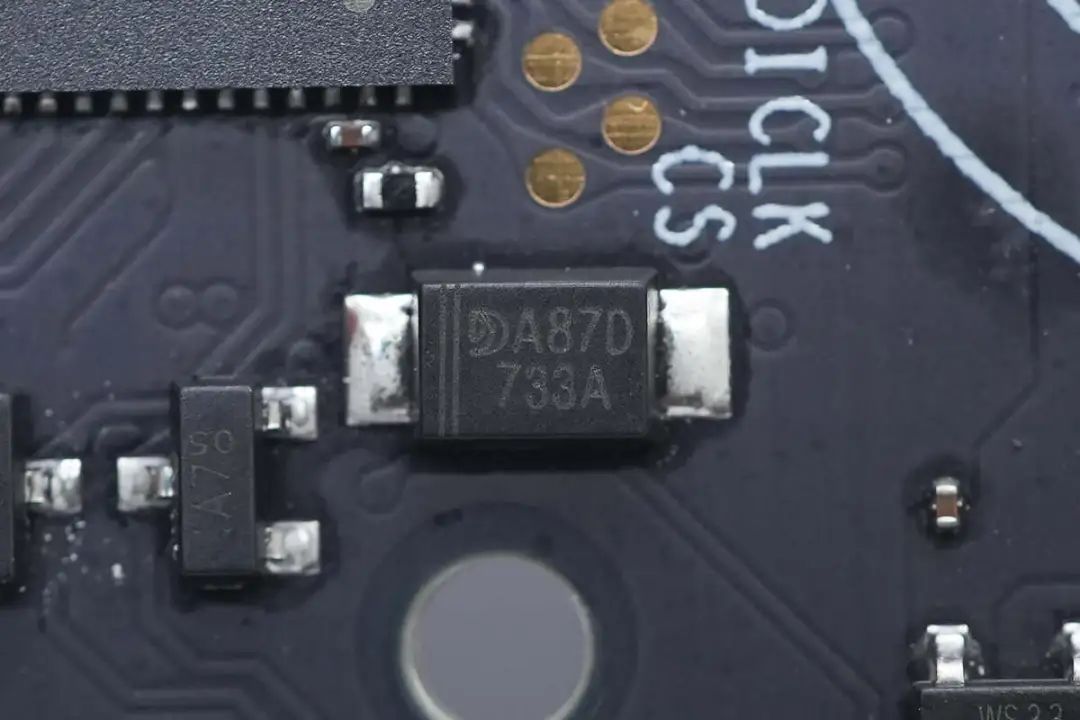
稳压管来自迪一电子,丝印733A,型号1SMAF4733A,工作电压5V,采用SMAF封装。
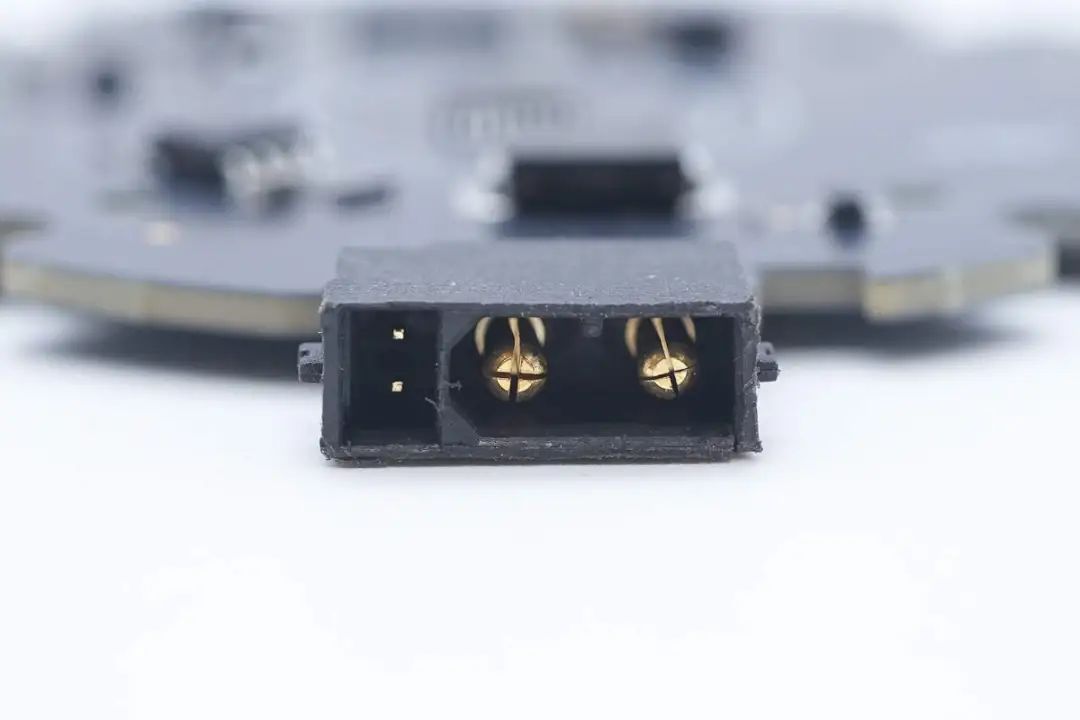
用于电机供电和控制的XT30插座特写。
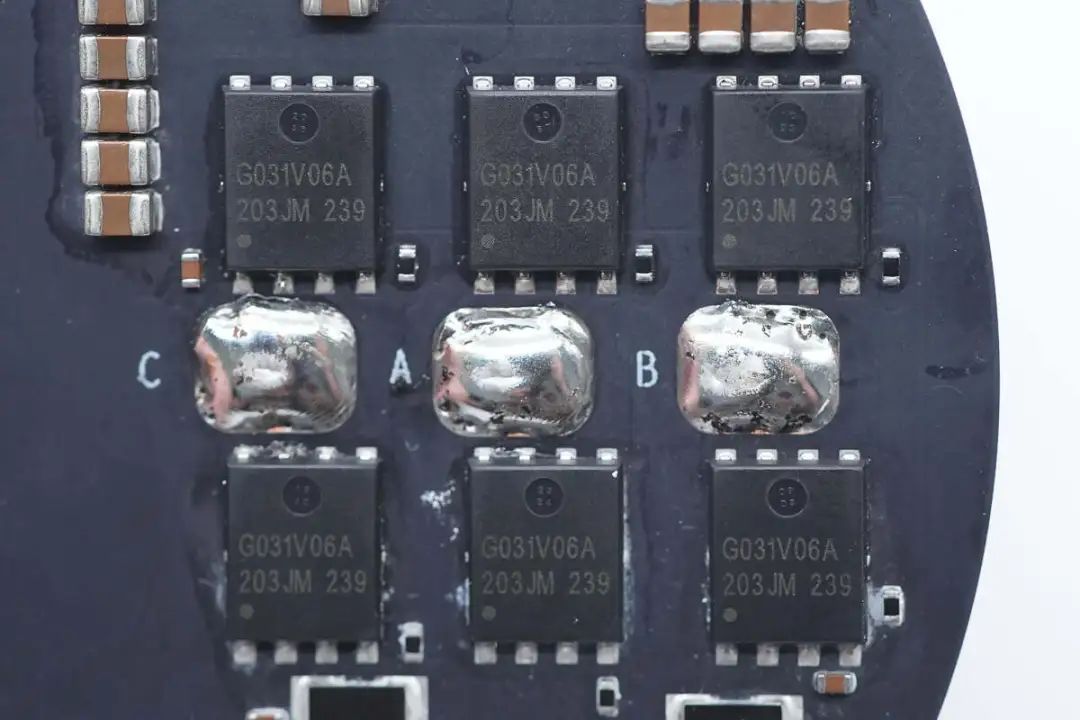
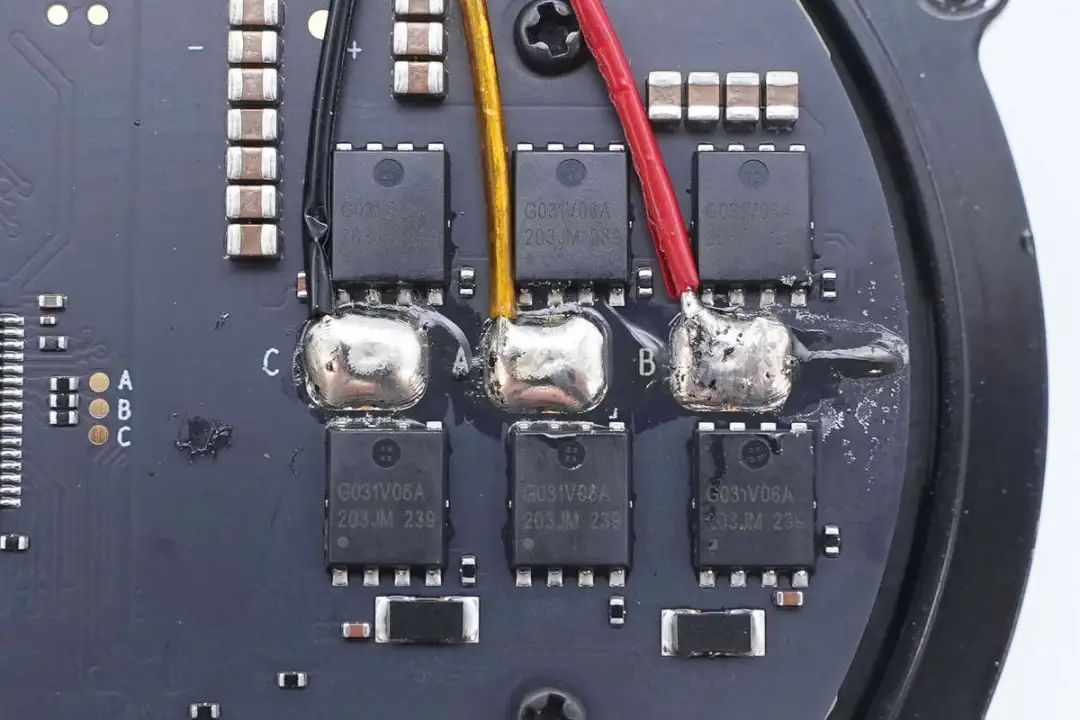
六颗驱动管用于三相电机驱动。

电机驱动管来自捷捷微电,型号JMGG031V06A,NMOS,耐压60V,导阻2.3mΩ,采用PDFN5*6-8L封装。
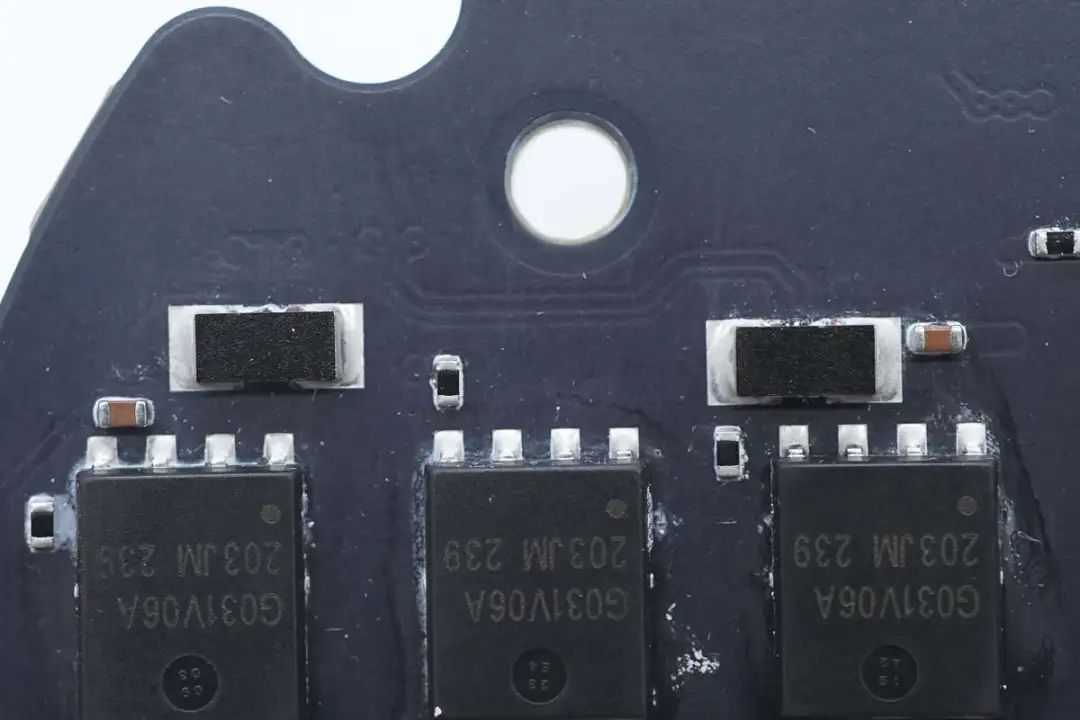
两颗检测驱动管电流的取样电阻特写。
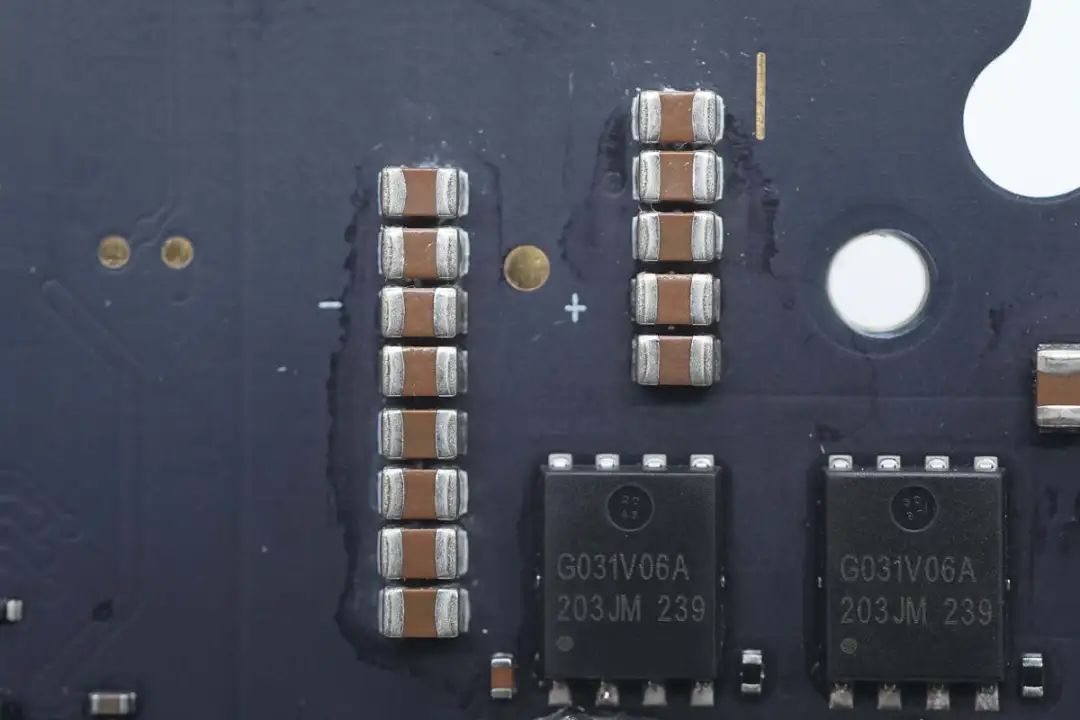
为驱动管供电滤波的MLCC电容特写。

电机转子在壳体内部,通过轴承承载。

转子壳体通过螺丝固定,内部设有减速齿轮。
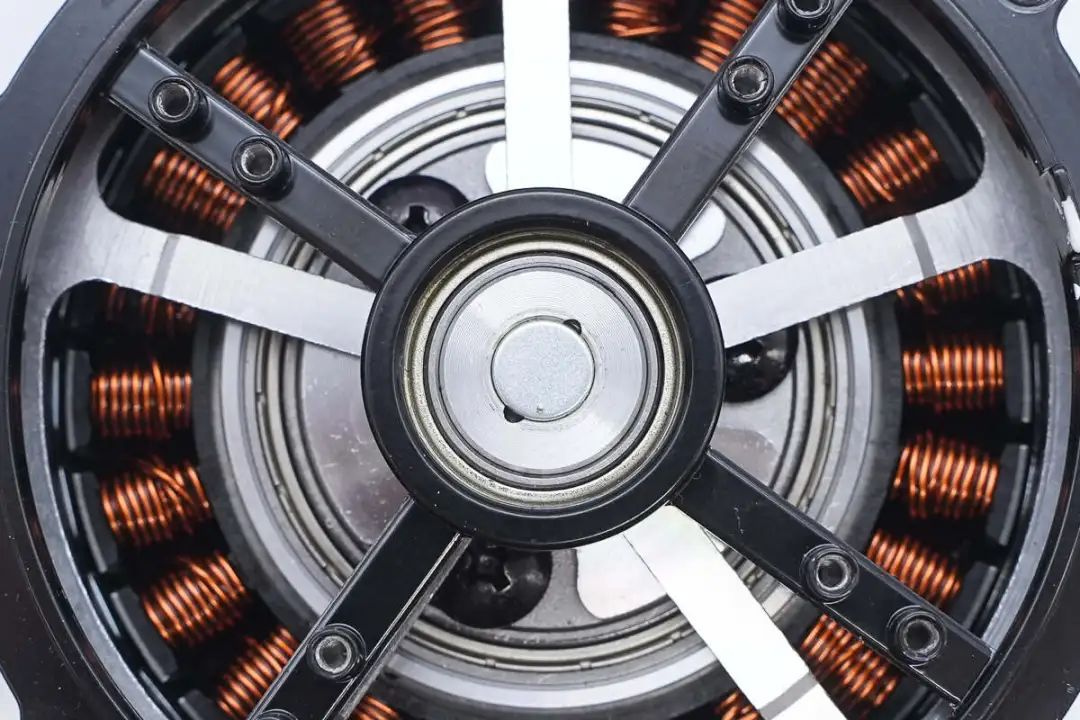
转子轴心设有检测转动角度的磁铁。

电机定子铁芯采用包塑工艺,线圈浸漆,提升保护和散热性能。

全部拆解一览,来张全家福。
充电头网拆解总结

最后附上小米CyberGear微电机的核心器件清单,方便大家查阅。
小米CyberGear微电机采用铝合金外壳,外壳涂黑加强散热。电机为机器人,桌面级机械臂和人形外骨骼应用,采用减速器、电机与驱动器一体设计。电机采用通用的XT30连接器,便于DIY使用和快速维护,电机内置自研的温度检测系统和保护算法,运行更加安全可靠。
充电头网通过拆解了解到,小米这款电机采用兆易创新MCU进行通信和保护控制,使用英飞凌电机驱动芯片用于电机驱动,开关管来自捷捷微电,供电使用MLCC电容滤波,并配有热敏电阻进行过热保护。电机内部结构精密,做工扎实。
 最前沿的电子设计资讯
最前沿的电子设计资讯

