
高工智能产业研究院(GGAI)发布报告称,2018年中国毫米波雷达市场规模将达到60亿元人民币,同比增长44%;到2025年,市场规模有望达到270亿元,市场规模可期。例如,24GHz毫米波雷达已经广泛应用于倒车盲区检测、无人机防撞等汽车和消费电子这样的大众市场。但是,市面上大多数24GHz毫米波雷达传感器仍使用尺寸庞大、复杂且构建成本高昂的分立组件来实现,这很大程度上限制了其在工业市场的广泛应用。
在不久前于深圳举办的ASPENCORE全球双峰会上,全球领先的高性能模拟半导体企业ADI公司展示了一款应用于交通路况监控、实时追踪目标车辆位置等工业级场景的24GHz雷达全链路解决方案。据ADI技术专家介绍,该方案基于ADI 24GHz雷达全信号链,如雷达天线、信号收发、滤波、模数转换等,以及具有竞争力成本的ADI DSP处理器平台,从软硬件层面进行全面的系统优化,实现低成本的解决方案。
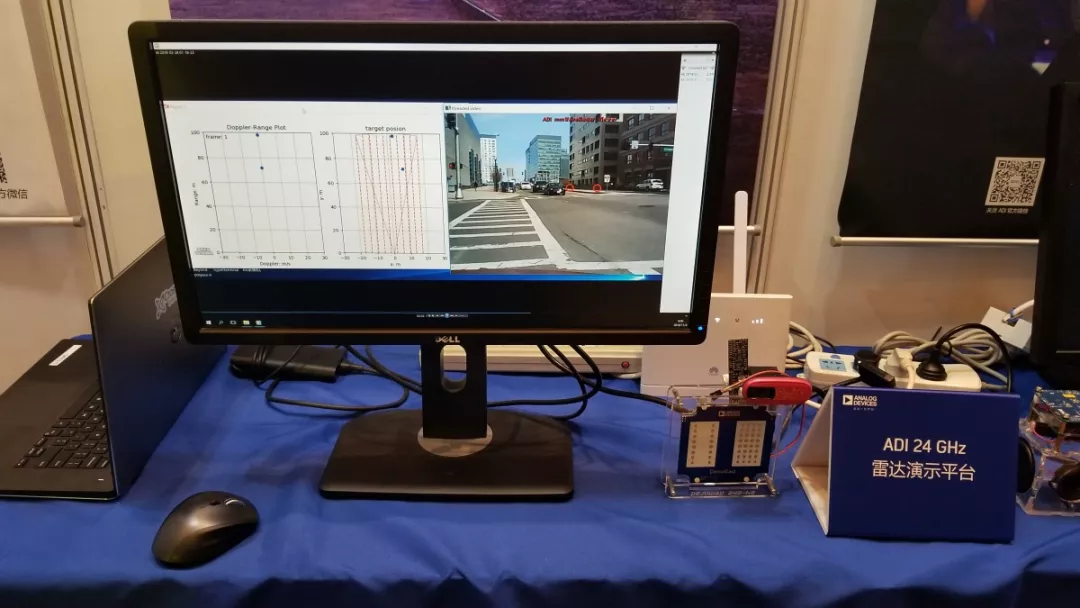
图1:ADI展示基于24GHz雷达演示平台的智能交通方案
同时,基于系统级优化的嵌入式雷达信号处理与探测算法,加上基于人工智能的多传感器融合、多目标检测与跟踪开放式架构,ADI公司这款方案可实现最多同时探测64个目标的应用场景,特别适用于交通路况监控等工业级应用场景。
笔者了解到,ADI公司针对评估、设计和制造雷达传感技术的公司所面临的上市时间挑战,推出了一款24GHz雷达系统级原型解决方案——DemoRad。该演示雷达系统是一款新颖的雷达评估平台,提供开箱即用的软件,可在数分钟内设置雷达传感器。演示雷达可对雷达产品进行快速原型制作,从而实时测量目标/对象存在、运动、角位置、速度以及距离。
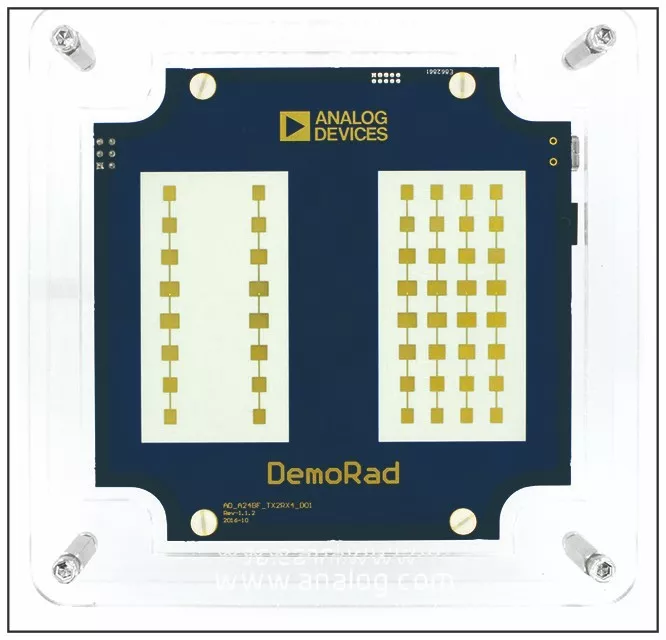
图2:24GHz演示雷达平台显示发送(左)和接收(右)天线
基于ADI公司一流的元器件硬件与信号处理技术,该原型平台包含了天线和完整的射频到基带信号链,包括ADI的24GHz芯片组和Blackfin数字信号处理器(DSP)。其中,前端包含两条发射(Tx)和四条接收(Rx)通道,天线位于印刷电路板的一侧,24GHz射频芯片组、模数转换器和DSP位于相反一侧,如下图所示。
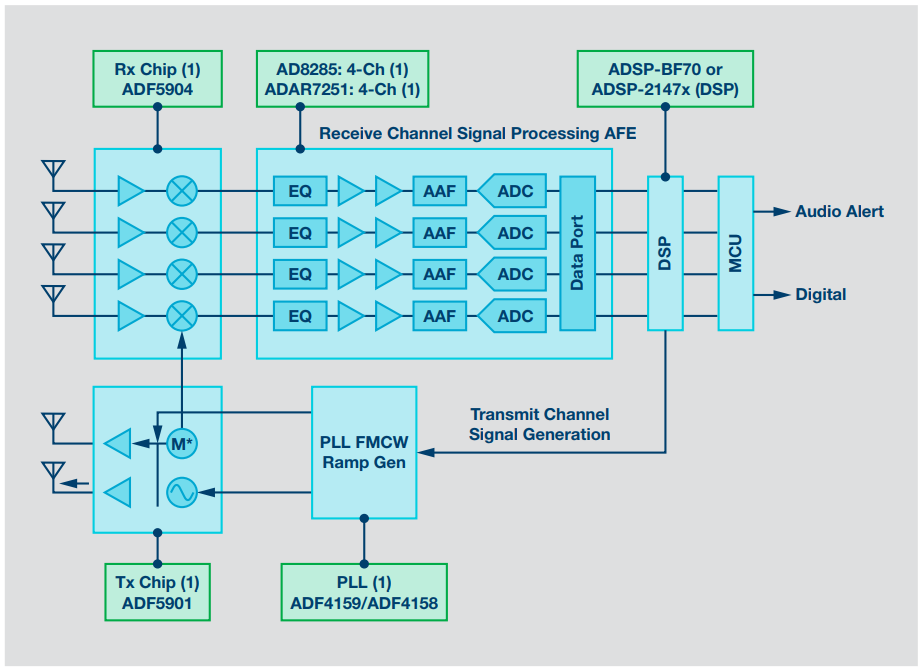
图3: ADI一流技术,构建RF-基带完整信号链
据ADI展位工作人员介绍,这些多通道支持多路输入多路输出(MIMO)功能,可以提高传感器的角分辨率。使用两个发送输出和适当的天线位置可以生成七条接收通道——四条实际通道和四条虚拟通道,一条通道重叠。
此外,信号处理选项包括原始数据采样和数字后处理,主要由ADI Blackfin库中提供实时快速傅立叶变换(FFT)和控制固件。此系统可处理高达每IF通道1.2MSPS的数据速率。ADI DemoRad平台可通过USB 2.0接口连接至搭载包含极易使用的图形用户界面(GUI)软件的计算机。这一GUI可控制24GHz前端,还可访问雷达算法库。或者,ADI DemoRAD平台还能调用MATLAB中开发的自定义例程,如2D/3D雷达FFT、CFAR和分类算法,写入用于后处理的原始传感器数据,十分易于设计与调试。
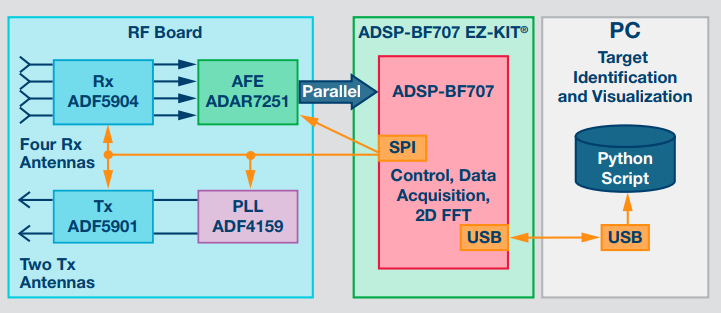
图4: ADI DemoRad平台可通过计算机进行调试与设计
据悉,ADI DemoRad演示雷达平台针对发送波形使用FMCW调制方式。图5说明了FMCW下,显示斜坡或扫频波形以及定义性能的雷达公式。距离分辨率取决于发送载波的扫描带宽,发送扫描带宽越高,雷达传感器的距离分辨率越高。速度分辨率取决于发送天线工作时间和载波频率,载波频率越高或发送天线工作时间越长,速度分辨率越高。角分辨率取决于载波频率,载波频率越高,角分辨率越好。
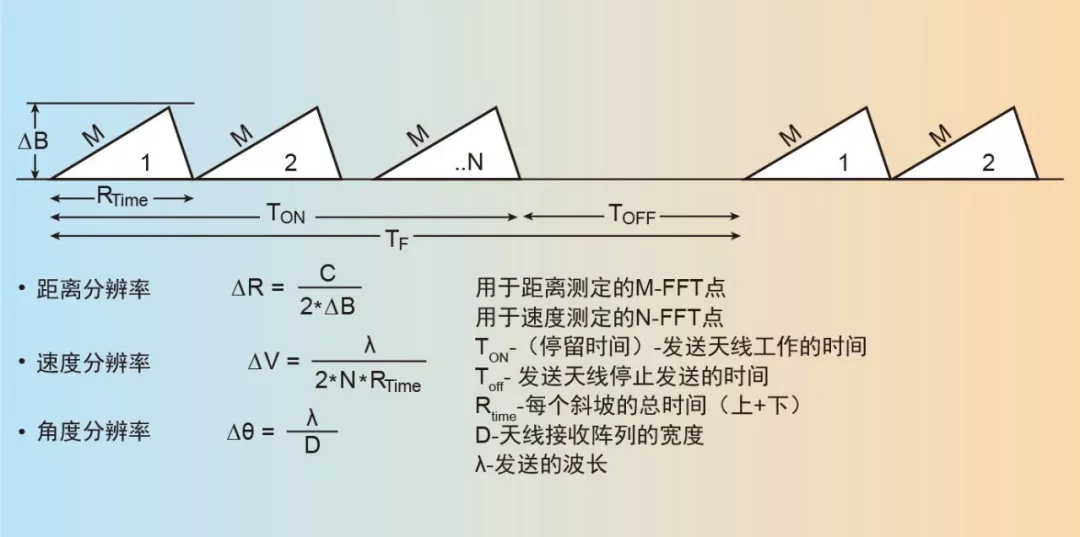
图5: FMCW雷达概念
对于ADI DemoRAD平台而言,其监测最远至200m且分辨率约为75cm的对象范围和速度。根据天线阵列设计,水平视野(FOV)方位角约为120度,垂直视野约为15度,对比业内同类产品拥有突出的性能。
不仅如此,雷达系统信号链还包括DSP中的一些基本算法:FFT、波束合成和CFAR。FFT提供距离和速度数据,波束合成可估计角度位置,CFAR可在出现杂波或其它噪声时检测目标。ADI DemoRad主要用于采集时域和频域中的雷达信号,不包括高级目标检测或对象分类算法。而基本目标检测和目标分类在主机PC上运行,这一应用开发通常由终端系统开发人员执行,他们了解雷达传感器的工作环境以及所需的对象检测类型,ADI DemoRad对此十分适用。
众所周知,一个原型系统除了高性能、易于调试等特性外,灵活性/可配置性依然不可或缺,从而适应不同条件的测试环境与需求。ADI DemoRad 24GHz雷达系统级原型解决方案,拥有高可靠的雷达性能以及多样的操作模式使其备受开发者青睐。
FMCW雷达:在FMCW模式下,ADI DemoRad平台可以测量静止目标的距离,目标的下变频接收信号的频率与到该目标的距离成比例。内置FFT可确定频率。使用距离-时间显示选项可以查看移动目标,同时显示屏会存储多个FMCW扫描。
距离-多普勒:在距离-多普勒模式下,ADI DemoRad平台可以确定到目标的距离以及速度。距离-多普勒模式是最强大的模式之一,因为它能够通过评估二维傅里叶变换同时处理多个发送斜坡或扫频,并将处理的数据显示在距离-多普勒图上。距离-多普勒非常强大,它可分离距离相同、速度不同的目标。这对于识别不同方向的多个快速移动目标非常有用。例如,解决汽车朝相反方向移动或超车期间的复杂交通情况。
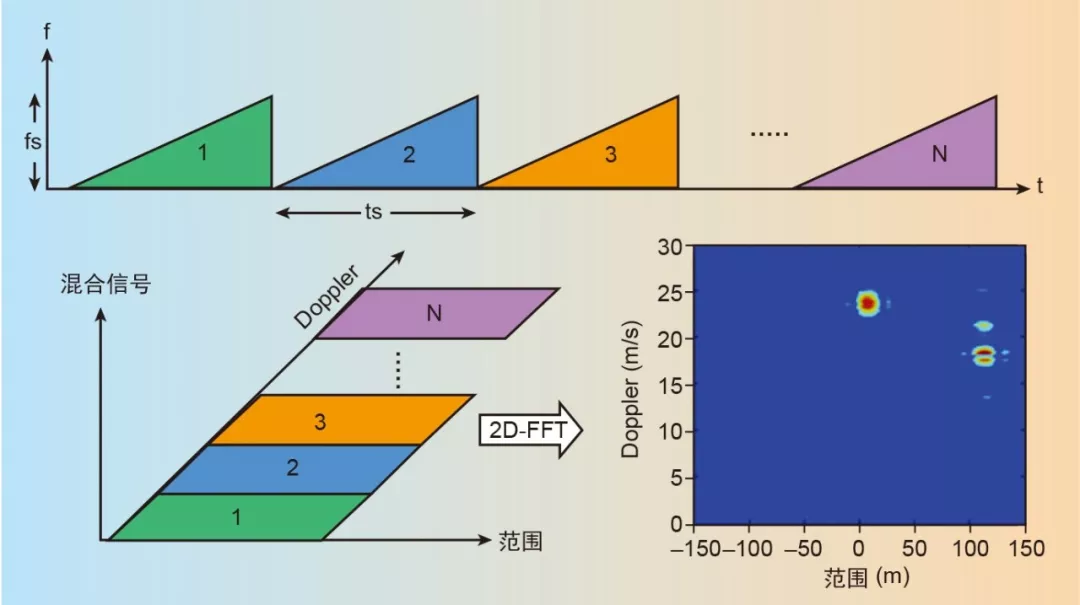
图6:利用2D FFT获取的距离和多普勒频率
数字波束成形(DBF):在DBF模式下,ADI DemoRad平台显示目标的距离以及与该目标所成的角度。来自四个接收通道的信号用于估计目标的角度,显示屏显示XY平面中各目标的空间分布。在此模式下,系统配置与FMCW模式下的相同,但对IF下变频信号的处理方式不同。在计算距离之后,通过评估四个接收通道之间的相位差来确定目标的角度。在DBF模式下,需要进行前端系统校准,以消除接收通道之间不必要的确定性相位差。每个演示雷达系统都具备工厂校准数据,在GUI运行时加载,随后会先校正采样的IF信号,再评估传感器的测量数据。
 最前沿的电子设计资讯
最前沿的电子设计资讯
