首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
图集
全部标签
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
视频工作室
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2025 中国国际低空经济产业创新发展大会
IIC Shanghai 2025
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
NEW
成都低空经济大会
标题
简介
内容
作者
全部
标题
简介
内容
作者
全部
首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2025 中国国际低空经济产业创新发展大会
IIC Shanghai 2025
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
×
杂志声明
我司杂志提供免费订阅,任何第三方平台的赠送或售卖行为均未获得我司授权,我司保留追究其法律责任的权利!
广告
CAN是什么?有哪些特点?
时间:
2021-08-24
作者:
汽车电子与软件
阅读:
分享
扫码分享到好友
海报分享
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。
CAN
是什么?
CAN
是
Controller Area Network
的缩写(以下称为
CAN
),是
ISO
国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应
“
减少线束的数量
”
、
“
通过多个
LAN
,进行大量数据的高速通信
”
的需要,
1986
年德国电气商博世公司开发出面向汽车的
CAN
通信协议。此后,
CAN
通过
ISO11898
及
ISO11519
进行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,
CAN
的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
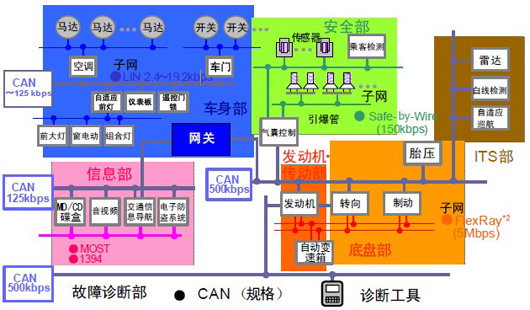
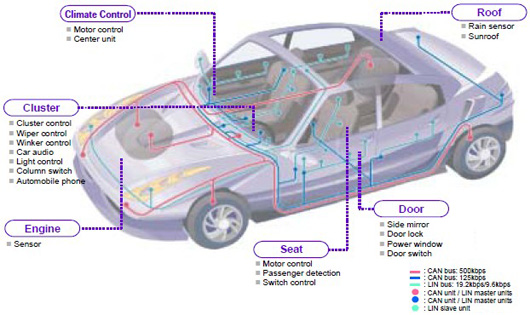
下图是车载网络的构想示意图。
CAN
等通信协议的开发,使多种
LAN
通过网关进行数据交换得以实现。
CAN的应用实例
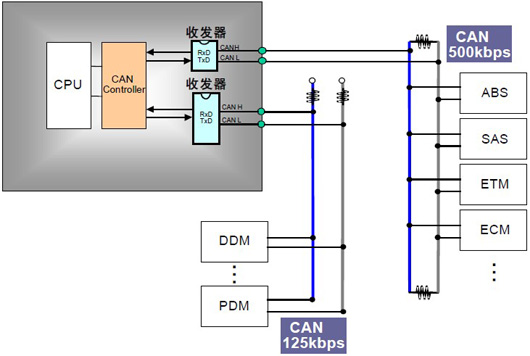
总线拓扑图
CAN
控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
CAN
的连接示意图
CAN的特点
CAN
协议具有以下特点:
(1)
多主控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权(
CSMA/CA
方式)。
多个单元同时开始发送时,发送高优先级
ID
消息的单元可获得发送权。
(2)
消息的发送
在
CAN
协议中,所有的消息都以固定的格式发送。
总线空闲时,所有与总线相连的单元都可以开始发送新消
息。两个以上的单元同时开始发送消息时,根据标识符(
Identifier
以下称为
ID
)决定优先级。
ID
并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息
ID
的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3)
系统的柔软性
与总线相连的单元没有类似于
“
地址
”
的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4)
通信速度
根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
(5)
远程数据请求
可通过发送
“
遥控帧
”
请求其他单元发送数据。
(6)
错误检测功能
·
错误通知功能
·
错误恢复功能
所有的单元都可以检测错误(错误检测功能)。
检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。
正在发送消息的单元一旦检测出错误,会强制结束当前的发送。
强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)。
(7)
故障封闭
CAN
可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
(8)
连接
CAN
总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
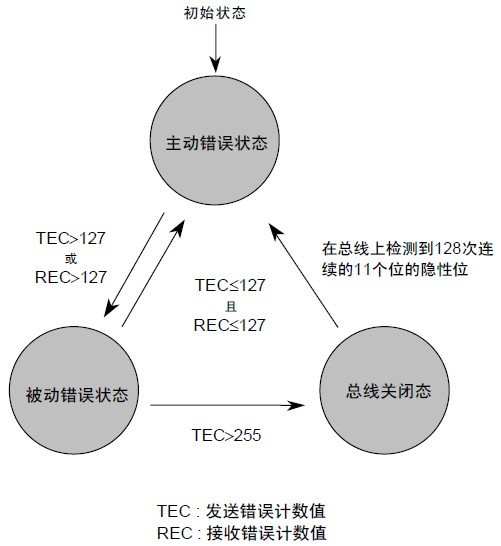
CAN的错误状态类型
单元始终处于
3
种状态之一。
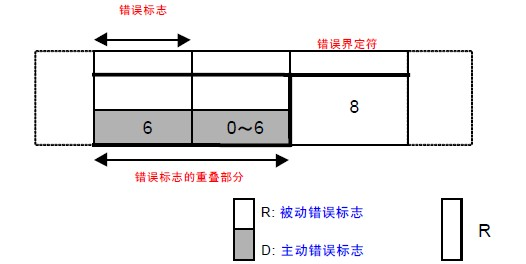
(1)
主动错误状态
主动错误状态是可以正常参加总线通信的状态。
处于主动错误状态的单元检测出错误时,输出主动错误标志。
(2)
被动错误状态
被动错误状态是易引起错误的状态。
处于被动错误状态的单元虽能参加总线通信,但为不妨碍其它单元通信,接收时不能积极地发送错误通知。
处于被动错误状态的单元即使检测出错误,而其它处于主动错误状态的单元如果没发现错误,整个总线也被认为是没有错误的。
处于被动错误状态的单元检测出错误时,输出被动错误标志。
另外,处于被动错误状态的单元在发送结束后不能马上再次开始发送。在开始下次发送前,在间隔帧期间内必须插入
“
延迟传送
”(8
个位的隐性位
)
。
(3)
总线关闭态
总线关闭态是不能参加总线上通信的状态。
信息的接收和发送均被禁止。
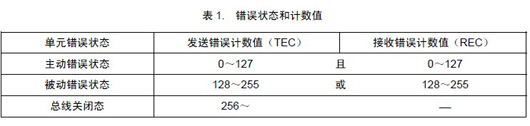
这些状态依靠发送错误计数和接收错误计数来管理,根据计数值决定进入何种状态。错误状态和计数值的关系如表
1
及图所示。
图:单元的错误状态
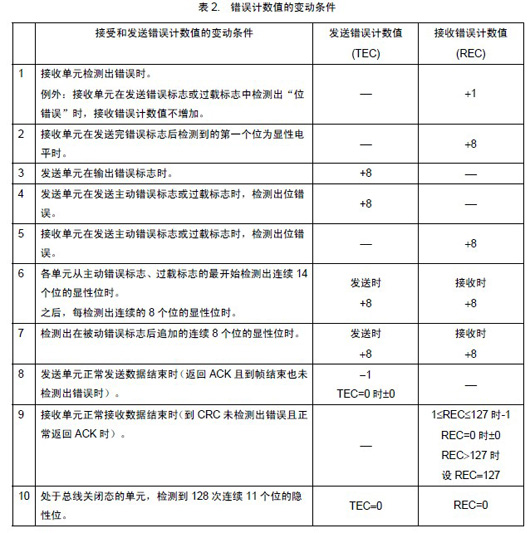
错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表
2
所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
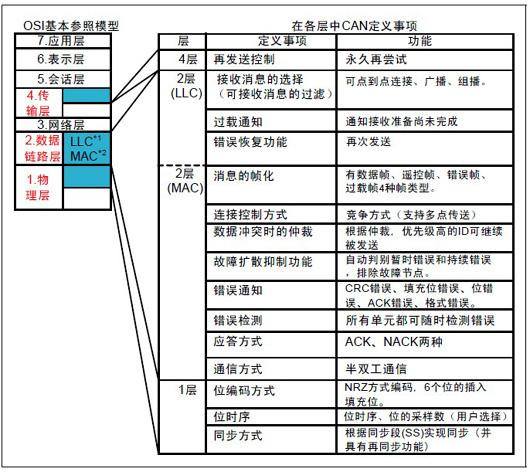
CAN协议的基本参照模型
CAN
协议如表
3
所示涵盖了
ISO
规定的
OSI
基本参照模型中的传输层、数据链路层及物理层。
CAN
协议中关于
ISO/OSI
基本参照模型中的传输层、数据链路层及物理层,具体有哪些
定义如图所示。
图:
ISO/OSI
基本参照模型和
CAN
协议
数据链路层分为
MAC
子层和
LLC
子层,
MAC
子层是
CAN
协议的核心部分。数据链路层的功能是将物理层收到的信号组织成有意义的消息,并提供传送错误控制等传输控制的流程。具体地说,就是消息的帧化、仲裁、应答、错误的检测或报告。数据链路层的功能通常在
CAN
控制器的硬件中执行。
在物理层定义了信号实际的发送方式、位时序、位的编码方式及同步的步骤。但具体地说,信号电平、通信速度、采样点、驱动器和总线的电气特性、连接器的形态等均未定义。这些必须由用户根据系统需求自行确定。
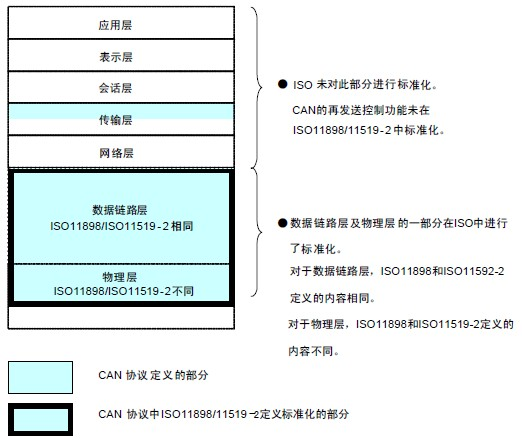
ISO 标准化的CAN 协议
CAN
协议经
ISO
标准化后有
ISO11898
标准和
ISO11519-2
标准两种。
ISO11898
和
ISO11519-2
标准对于数据
链路层的定义相同,但物理层不同。
(1)
关于
ISO11898
ISO11898
是通信速度为
125kbps-1Mbps
的
CAN
高速通信标准。
目前,
ISO11898
追加新规约后,成为
ISO11898-1
新标准。
(2)
关于
ISO11519
ISO11519
是通信速度为
125kbps
以下的
CAN
低速通信标准。
ISO11519-2
是
ISO11519-1
追加新规约后的版本。
下图
表示
CAN
协议和
ISO11898
及
ISO11519-2
标准的范围。
图:
ISO
标准化的
CAN
协议
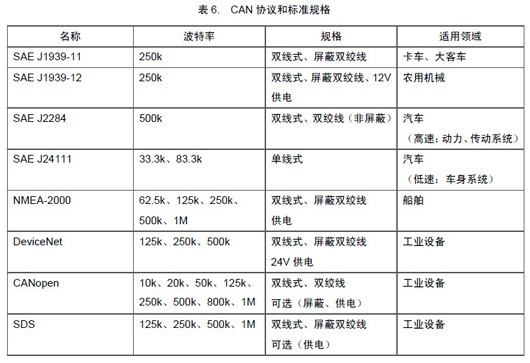
CAN 和标准规格
不仅是
ISO
,
SAE
等其它的组织、团体、企业也对
CAN
协议进行了标准化。
基于
CAN
的各种标准规格如表
6
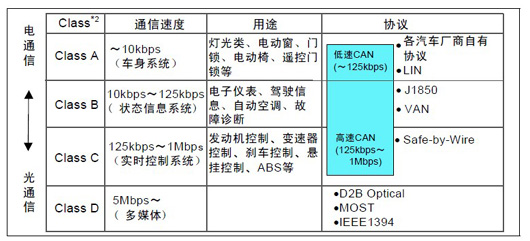
所示,如图所示,面向汽车的通信协议以通信速度为准进行了分类。
图:通信协议分类
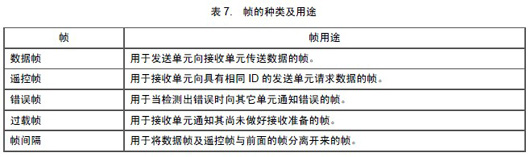
CAN协议报文
1. 帧的总类
通信是通过以下
5
种类型的帧进行的。
●
数据帧
●
遥控帧
●
错误帧
●
过载帧
●
帧间隔
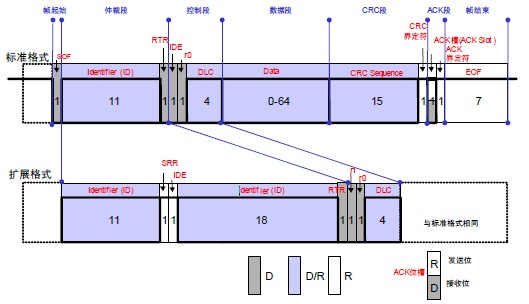
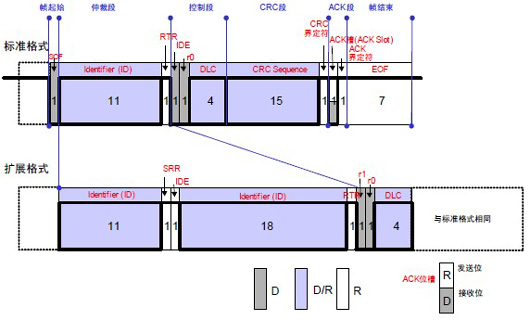
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有
11
个位的标识符(
Identifier:
以下称
ID
),扩展格式有
29
个位的
ID
。
各种帧的用途如表
7
所示,各种帧的构成如图
1
~图
5
所示。
图
1.
数据帧的构成
图2.遥控帧的构成
图3.错误帧
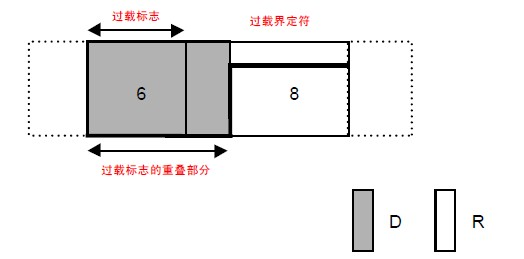
图4.过载帧
图5.帧间隔
2.优先级的决定
在总线空闲态,最先开始发送消息的单元获得发送权。
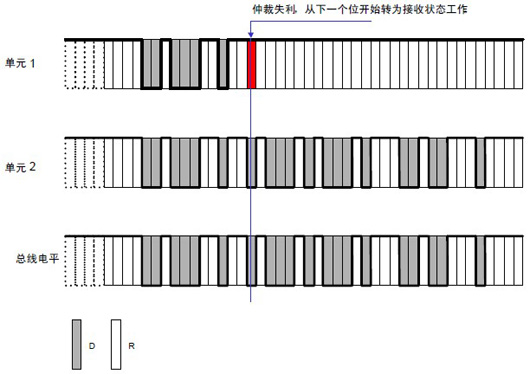
多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送。
仲裁的过程如图所示。
图
.
仲裁过程
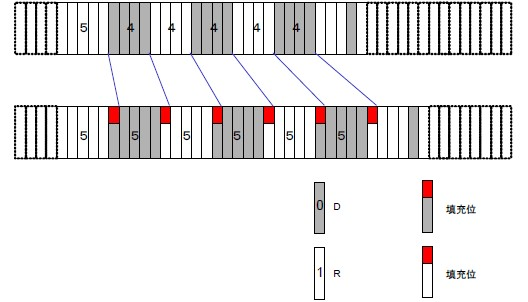
3.
位填充
位填充是为防止突发错误而设定的功能。当同样的电平持续
5
位时则添加一个位的反型数据。
位填充的构成如图 所示。
(1)
发送单元的工作
在发送数据帧和遥控帧时,
SOF
~
CRC
段间的数据,相同电平如果持续
5
位,在下一个位(第
6
个位)则要插入
1
位与前
5
位反型的电平。
(2)
接收单元的工作
在接收数据帧和遥控帧时,
SOF
~
CRC
段间的数据,相同电平如果持续
5
位,需要删除下一个位(第
6
个位)再接收。如果这个第
6
个位的电平与前
5
位相同,将被视为错误并发送错误帧。
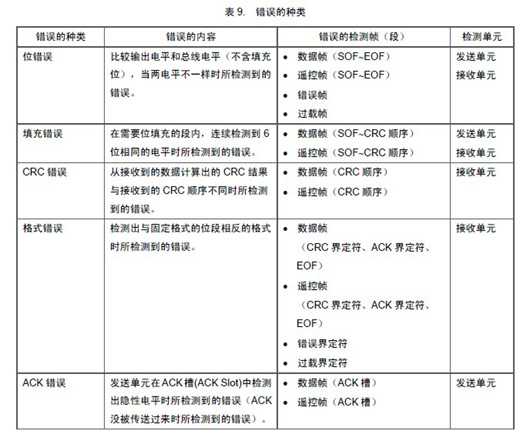
4. 错误的种类
错误共有
5
种。多种错误可能同时发生。
●
位错误
●
填充错误
● CRC
错误
●
格式错误
● ACK
错误
错误的种类、错误的内容、错误检测帧和检测单元如表
9
所示。
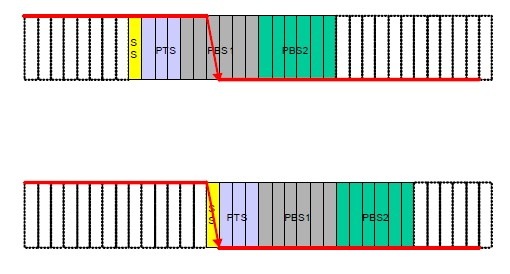
5.位时序
由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为
4
段。
●
同步段(
SS
)
●
传播时间段(
PTS
)
●
相位缓冲段
1
(
PBS1
)
●
相位缓冲段
2
(
PBS2
)
这些段又由可称为
Time Quantum
(以下称为
Tq
)的最小时间单位构成。
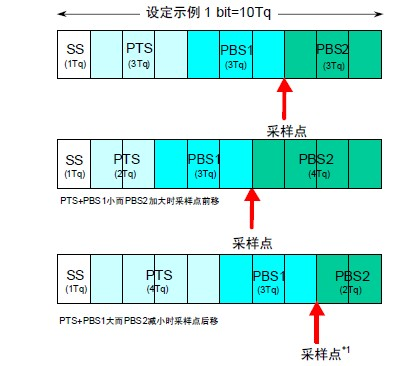
1
位分为
4
个段,每个段又由若干个
Tq
构成,这称为位时序。
1
位由多少个
Tq
构成、每个段又由多少个
Tq
构成等,可以任意设定位时序。通过设定位时序,多 个单元可同时采样,也可任意设定采样点。
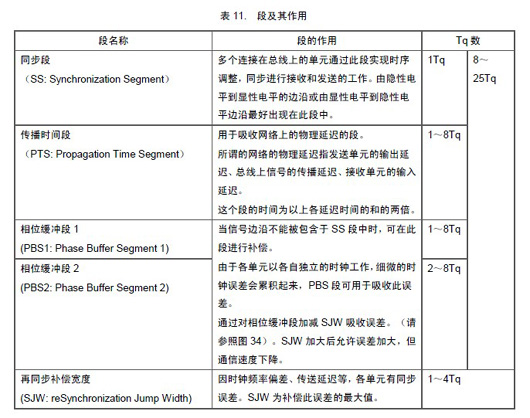
各段的作用和
Tq
数如表
11
所示。
1
个位的构成如图所示。
6. 取得同步的方法
CAN
协议的通信方法为
NRZ
(
Non-Return to Zero
)方式。各个位的开头或者结尾都没有附加同步信号。发送单元以与位时序同步的方式开始发送数据。另外,接收单元根据总线上电平的变化进行同步并进行接收工作。但是,发送单元和接收单元存在的时钟频率误差及传输路径上的(电缆、驱动器等)相位延迟会引起同步偏差。因此接收单元通过硬件同步或者再同步的方法调整时序进行接收。
6.1
硬件同步
接收单元在总线空闲状态检测出帧起始时进行的同步调整。
在检测出边沿的地方不考虑
SJW
的值而认为是
SS
段。
硬件同步的过程如图所示。
硬件同步的过程如图所示。
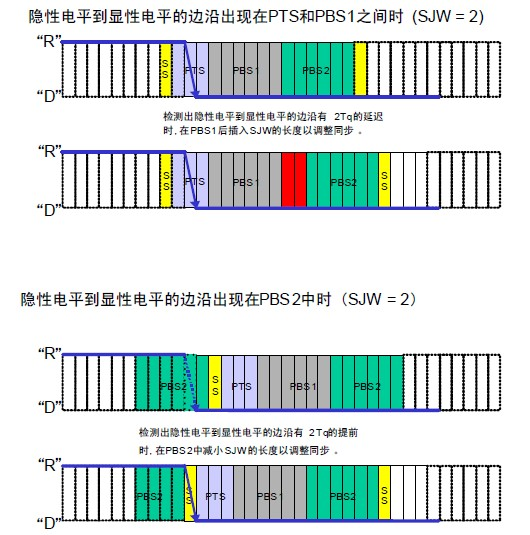
6.2
再同步
在接收过程中检测出总线上的电平变化时进行的同步调整。
每当检测出边沿时,根据
SJW
值通过加长
PBS1
段,或缩短
PBS2
段,以调整同步。但如果发生了超出
SJW
值的误差时,最大调整量不能超过
SJW
值。
再同步如图所示。
6.3
调整同步的规则
硬件同步和再同步遵从如下规则:
(1) 1
个位中只进行一次同步调整。
(2)
只有当上次采样点的总线值和边沿后的总线值不同时,该边沿才能用于调整同步。
(3)
在总线空闲且存在隐性电平到显性电平的边沿时,则一定要进行硬件同步。
(4)
在总线非空闲时检测到的隐性电平到显性电平的边沿如果满足条件(
1
)和(
2
),将进行再同步。但还要满足下面条件。
(5)
发送单元观测到自身输出的显性电平有延迟时不进行再同步。
(6)
发送单元在帧起始到仲裁段有多个单元同时发送的情况下,对延迟边沿不进行再同步。
文章来源
:
润芯微科技公众号
—
END
—
投稿合作:18918250345(微信)
文章来源及版权属于汽车电子与软件,EDN电子技术设计仅作转载分享,对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如有疑问,请联系
Demi.xia@aspencore.com
阅读全文,请先
汽车电子与软件
汽车电子与软件
进入专栏
汽车电子
网络/协议
分享到:
返回列表
上一篇:
带均衡的data信号!DDR5仿真技术详解(下)
下一篇:
与苹果音频系统相比,高通骁龙畅听在安卓生态下有哪些优势?
微信扫一扫
一键转发
最前沿的电子设计资讯
请关注
“电子技术设计微信公众号”
推荐内容
兴趣推荐
100个射频笔试面试常见问题及答案
100个射频面试常见问题及答案,涵盖基础知识、项目经验、技术技能等多个方面···
拆解报告:光威龙武·奕32GB 6000MHz DDR5内存
光威龙武 · 奕系列DDR5内存标称频率为6000MHz,时序为CL-36-40-40-96,32G双条套装能够很好满足日常生产力和游
拆解报告:九号210W电动自行车新国标锂电池充电器
九号210W电动自行车新国标充电器采用和此前拆解的160W款相同设计语言,经典长方体造型设计,同时自带电源线以及
强监管下的智能汽车:新规详解
这次监管的强化,以安全为核心重塑了智能网联汽车行业的监管框架,通过严格的准入、测试、宣传和OTA管理要求,遏
人形机器人5万亿美元市场崛起,中国将成为主导者?
人形机器人不是一次消费电子迭代,而是一场深刻的工业与社会基础设施重构。未来,谁能控制“大脑算法 + 本体制
2025年第18周新能源周销量,环比下降
在2025年第18周(4月28日至5月4日)期间,乘用车市场总销量达到了42.3万辆,较前一周减少了6.4%,同比增长了17.6%。
评测:MORROR ART X1 VWS耳机
MORROR ART X1 VWS显示蓝牙耳机是一款头戴式无线耳机,为全方位了解该耳机的实际表现,我爱音频网对该耳机进行
拆解报告:捷安特250W电动自行车充电器
捷安特电动自行车充电器输入为品字接口,自带1米长输出线。充电器仅支持220V交流输入,输出电压为41.8V,输出电流
开灯那刻,我竟和宇宙对话了?
奥特曼的光来自哪里?我们能否在现实中,以不同的方式“召唤”这种光?
评测:森海塞尔ACCENTUM Open真无线耳机半入耳机
森海塞尔ACCENTUM Open 真无线耳机采用半入耳式设计,搭配约4.4克的重量,佩戴舒适。耳机充电盒轻盈小巧,携带外
评测:Bose SoundLink Flex便携式扬声器(第 2 代)
Bose SoundLink Flex 便携式扬声器(第 2 代)整体做工质感好,具有不错的便携性,同时还有出色的防护效果;采用防摔
拆解报告:EDIFIER漫步者X1 Evo真无线耳机
EDIFIER漫步者X1 Evo真无线耳机在外观方面采用了极致简约的设计,白色配色,纯净无暇。同时,还具有着非常轻巧的
拆解报告:三星Galaxy Watch 6智能手表
SAMSUNG三星Galaxy Watch 6智能手表在外观方面,延续了系列经典设计风格。圆形表盘,一体式中框,线条流畅,简约时
特斯拉vs比亚迪:欧洲市场2025年4月销量比较
今年纯电动汽车出海,和插电混动出海是我们关注的,在欧洲我们努力做细致一些,覆盖主要的中国汽车品牌。
蔚来改变进行时:三大品牌如何协同?
我们可以清晰地看到蔚来当前的核心战略蓝图:以“智能汽车新三大件”为代表的底层技术创新是驱动公司发展的根
LG新能源2025年第一季度财报:降本增效、扭亏为盈
LG新能源2025年第一季度财报展,通过成本控制、北美产能优化和IRA税收抵免,公司实现扭亏为盈,营业利润3,750亿韩
评测:QCY Crossky R70小飞翼
为全面了解该耳机的实际表现,我爱音频网对QCY Crossky R70小飞翼挂耳耳机进行了详细的测试与体验,主要为外观
拆解报告:aigo爱国者S21无线领夹麦克风
aigo爱国者S21无线领夹麦克风在外观方面,整体体积在主流产品中较为轻巧,提供了更好的便携性。麦克风采用了长
加拿大2025年第一季度:同比微增3.7%
2025年第一季度,加拿大新车市场在轻型卡车的推动下实现稳健增长,通用汽车凭借Chevrolet Silverado和GMC Sierr
米尔-瑞萨RZ/G2L核心板开发板的系统启动时间优化应用笔记
本文主要介绍基于MYD-YG2LX开发板进行系统启动时间优化的调试案例,一般启动方式有去掉常规uboot,直接使用SPL
2025松山湖中国IC创新高峰论坛:继续聊聊机器人
去年的主题是智慧机器人,今年的主题仍然聚焦于机器人身上,不过变为了具身智慧机器人……
鹏瞰TS-PON Gen2芯片,用光协议重塑机器人“神经网络”?
TS-PON Gen2芯片是一款灵活的软件定义 SoC,适用于多种场景。它基于无源光网(PON)技术,具备高带宽(目前10G,未来
让人形机器人“耳聪目明”,昆泰芯KTM5900磁性编码器解析
编码器芯片作为机器人的核心传感器之一,对于提升机器人的感知能力、安全性和生产效率具有重要意义···
如何让具身机器人“看”得清?思特威给出了这个答案
相比于滚动快门传感器,全局快门传感器能够同时曝光整个画面,有效避免了运动过程中产生的图像形变,为机器视觉提
广告
热门评论
最新评论
换一换
换一换
广告
热门推荐
广告
广告
EE直播间
更多>>
在线研讨会
更多>>
学院
录播课
直播课
更多>>
更多>>
更多>>
更多>>
广告
最新下载
最新帖子
最新博文
面包芯语
更多>>
热门TAGS
产业前沿
消费电子
技术实例
EDN原创
电源管理
新品
汽车电子
处理器/DSP
通信
传感器/MEMS
模拟/混合信号/RF
工业电子
制造/工艺/封装
无线技术
人工智能
安全与可靠性
EDA/IP/IC设计
测试与测量
查看更多TAGS
广告
×
向右滑动:上一篇
向左滑动:下一篇
我知道了




 最前沿的电子设计资讯
最前沿的电子设计资讯

