
1. 探测原理LiDAR的探测原理主要分为以下三类,(a) Pulsed TOFTOF的全称是time of flight, 即通过飞行时间获知待测物体的距离。脉冲式TOF的工作原理如下图所示,
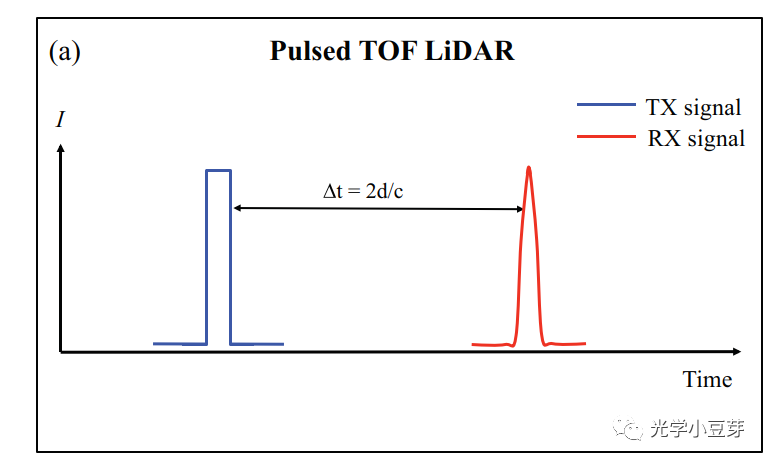
由于发射的是脉冲信号,其峰值功率可以非常高,因此脉冲TOF的方法可以探测较远的距离。
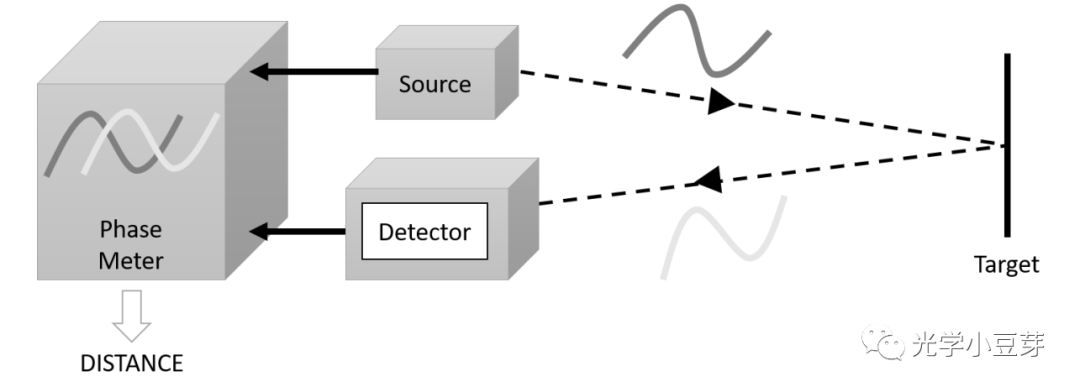
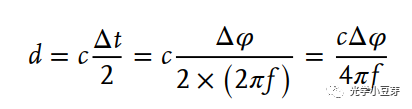
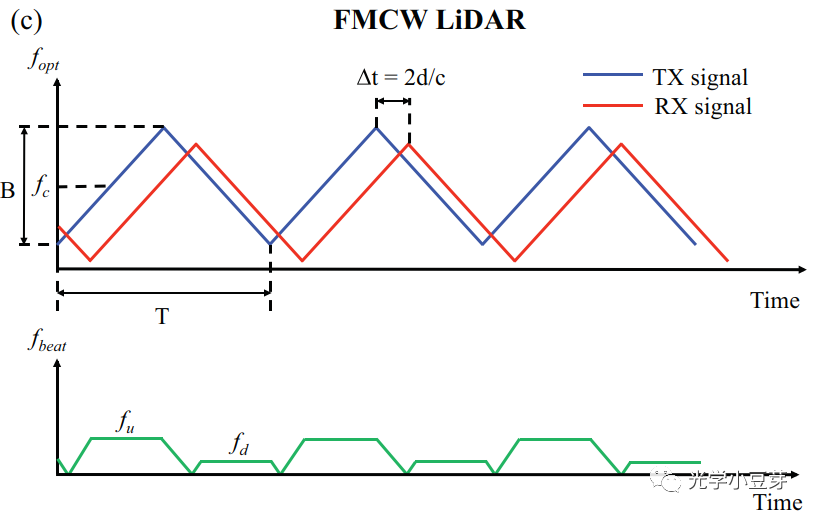
相比于TOF方案,FMCW的主要优势:(1)由于采用相干检测的方法,FMCW不受附近其他LiDAR系统的影响, (2)基于多普勒效应,可以同时获知物体的速度信息,(3)对光源光功率要求低,(4)深度精度高。
这三种探测方案的比较如下图所示,
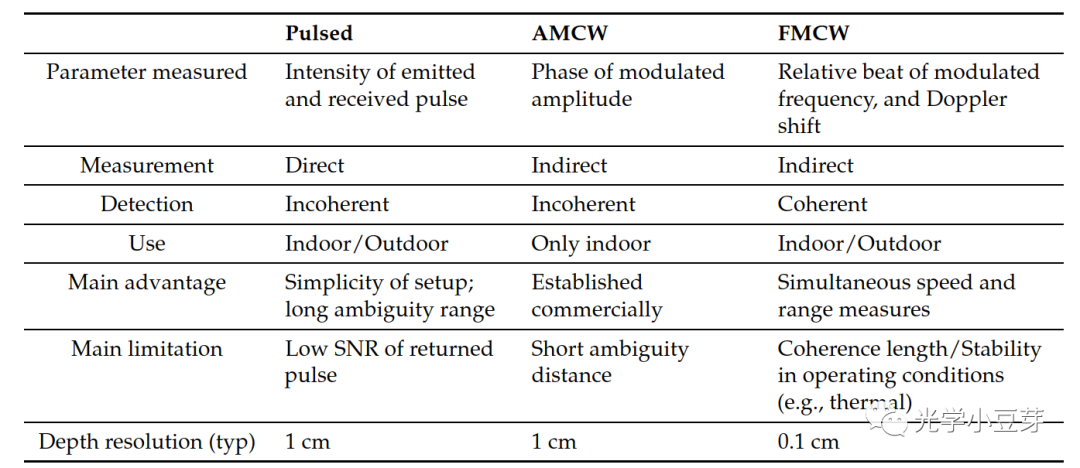
(表格来自文献2)
2. 固态激光雷达
固态激光雷达按照成像方式可以分为三大类,即Flash型,MEMS型和OPA型。
(a) Flash型
Flash型激光雷达的成像原理与照相机类似,光源发出脉冲光,入射到物体后散射到探测器阵列上,如下图所示,不同位置的探测器可以接收到物体不同位置散射的信号,从而获悉物体的深度信息。
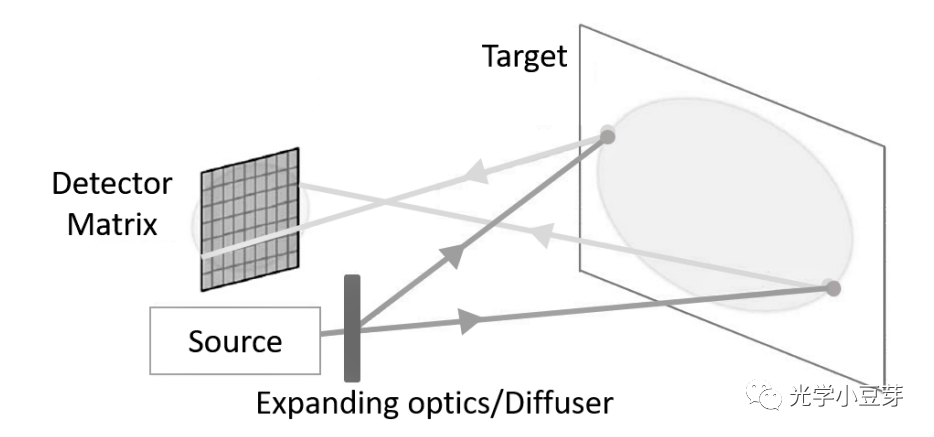
(图片来自文献2)
之所以取名为flash型, 因为光信号只发射一次,只要一次快闪flash就可以记录整个场景的信息。由于探测器接收到的信号强度与距离成反比,对于远距离探测的场景,学界在研究基于单光子雪崩二极管(single photon avalanche diode,简称SPAD)的探测器阵列的方案。
(b) MEMS型
相比于传统的机械式扫描LiDAR, MEMS型LiDAR采用集成于芯片上的微透镜作为光束扫描的元件,通过微透镜转动调整光束的发射角度,具有体积小、可靠性高和功耗低等优势。
(c) OPA型
OPA的全称是optical phase array, 即光相控阵。它的工作原理如下图所示,
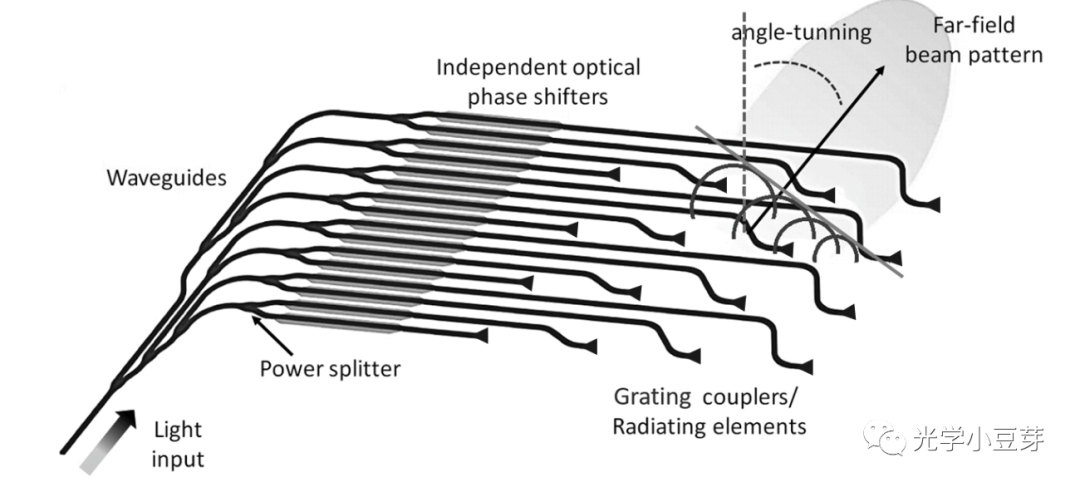
(图片来自文献2)
基于集成光学,光束在芯片内部被分为多路,每一路光的相位可以通过电信号进行控制,多路光路干涉后光束以特定角度发射。通过调整每一路光束的相对相位,可以实现对发射光束角度的调整。相较于另外两种固态LiDAR, OPA型LiDAR的扫描速度更快,并且有望做到与激光器单片集成。但是目前OPA型LiDAR还处于实验室研究阶段。
这几种固态LiDAR的比较如下表所示,
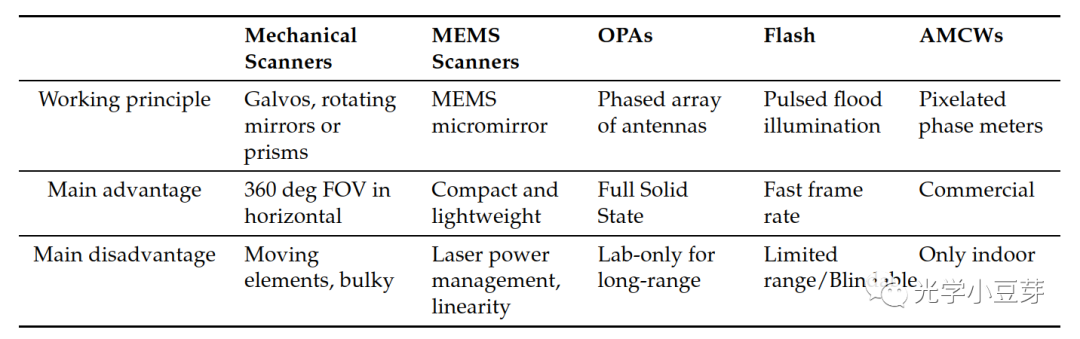
(表格来自文献2)
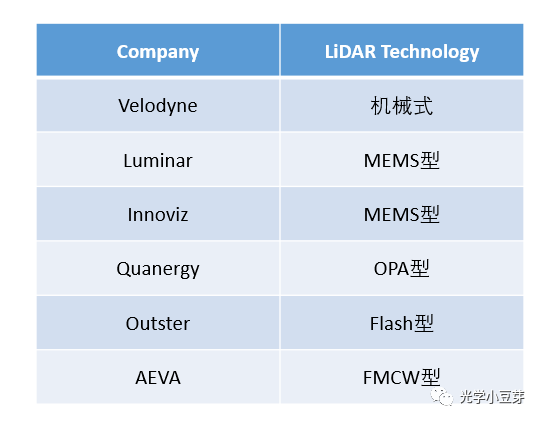
总体说来,激光雷达方案是上述几种方案的组合,以下是目前上市LiDAR公司采用方案与路线的整理,目前主流方案还是机械式和MEMS型,但是固态LiDAR是大家都比较认可的发展方向。
以上是对固态激光雷达技术基本知识点的简单整理,小豆芽刚接触这一方向,认识还比较粗浅,如果有表述不准确或者错误的地方,欢迎大家指正批评。
参考文献:1. N. Li, et.al., "A Progress Review on Solid-State LiDAR and Nanophotonics-Based LiDAR Sensors", Laser & Photonics Reviews 2100511(2022)2. S. Royo, et.al. , "An Overview of Lidar Imaging Systems for Automotive Vehicles", machines 9,4093(2019)
 最前沿的电子设计资讯
最前沿的电子设计资讯

