
美国西北大学的工程师已经开发出有史以来最小的遥控步行机器人。这些小螃蟹只有半毫米宽,可以弯曲、扭曲、爬行、行走、转身甚至跳跃。研究人员还开发了毫米大小的机器人,类似于蟋蟀和甲虫。
尽管目前这项研究处于探索性阶段,但研究人员认为,他们的技术可能会使该领域更接近于实现能够在狭窄空间内执行实际任务的微型机器人。
该研究于周三(5 月 25 日)发表在《Science Robotics》杂志上。值得一提的是,去年 9 月,同一个团队推出了一种带翼微芯片,这是有史以来最小的人造飞行结构。


亚毫米尺寸机器人的应用范围从临床医学中的微创外科手术工具到生物学研究中用于操纵细胞/组织的工具。然而,可用于此类机器人的结构和材料种类有限,这给实现所需的性能参数和操作模式带来了挑战。

一个比跳蚤还小的螃蟹机器人站在硬币的边缘。来源:西北大学
“我们的技术能够实现各种受控运动方式,并且可以以每秒一半的身体长度的平均速度行走,”领导理论工作的黄永刚表示。“对于陆地机器人来说,要在如此小的规模上实现这一点非常具有挑战性。”
螃蟹比跳蚤还小,它不是由复杂的硬件、液压或电力驱动的。相反,它的力量在于它身体的弹性。为了构建机器人,研究人员使用了一种形状记忆合金材料,这种材料在加热时会转变为“记忆”的形状。在这种情况下,研究人员使用扫描的激光束在机器人身体的不同目标位置快速加热。一层薄薄的玻璃涂层在冷却时弹性地使相应的结构部分恢复到其变形的形状。

比跳蚤还小,几个微型螃蟹机器人站在一起。
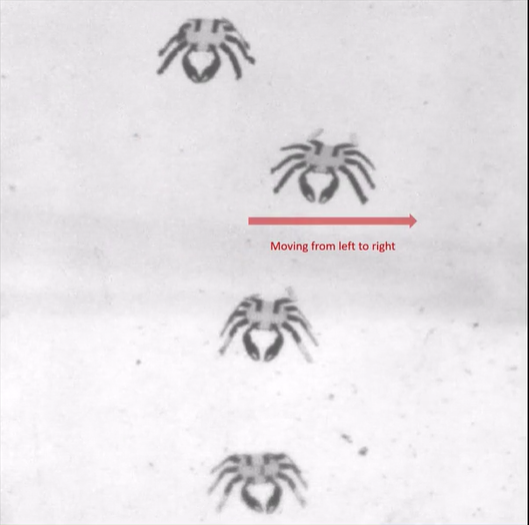
随着机器人从一个阶段变为另一个阶段会使它产生运动,例如变形为记忆形状并再次变回。激光不仅远程控制机器人启动,激光扫描方向也决定了机器人的行走方向。例如,从左向右扫描会导致机器人从右向左移动。
“因为这些结构非常小,冷却速度非常快,”罗杰斯解释说。“事实上,缩小这些机器人的尺寸可以让它们跑得更快。”
为了制造这么小的小动物,罗杰斯和黄转向了他们八年前引入的一种技术——一种受儿童弹出式书籍启发的弹出式组装方法。
首先,该团队以平坦的平面几何形状制造了行走蟹结构的前身。然后,他们将这些前体粘合到略微拉伸的橡胶基材上。当拉伸的基材松弛时,会发生受控的屈曲过程,导致螃蟹“弹出”成精确定义的三维形状。
比跳蚤还小的四只机器螃蟹,展示了它们的行走技巧。
通过这种制造方法,西北大学的团队可以开发出各种形状和大小的机器人。
“通过这些组装技术和材料概念,我们可以制造几乎任何尺寸或 3D 形状的步行机器人,”罗杰斯说。“但学生们对小螃蟹的侧身爬行动作感到鼓舞和逗乐。这是一种创造性的奇思妙想。”
制造过程利用受控的机械屈曲来创建 3D 多材料结构,其布局范围从细丝阵列和折纸结构到仿生结构等。与单向形状记忆合金相关的力和封装壳的弹性回弹力的平衡为这些结构的可逆变形提供了基础。
运动和操纵模式从全局加热时的弯曲、扭曲和膨胀到激光诱导的局部热驱动时的线性/曲线爬行、行走、转弯和跳跃。后向反射器和比色传感材料等光子结构支持简单形式的无线监控和定位。
这些在材料、制造、驱动和传感方面的集体进步增加了这一新兴技术领域不断增长的能力。
Demi Xia编译
 最前沿的电子设计资讯
最前沿的电子设计资讯
