首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
图集
全部标签
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
视频工作室
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2025 中国国际低空经济产业创新发展大会
IIC Shanghai 2025
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
NEW
成都低空经济大会
标题
简介
内容
作者
全部
标题
简介
内容
作者
全部
首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2025 中国国际低空经济产业创新发展大会
IIC Shanghai 2025
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
×
杂志声明
我司杂志提供免费订阅,任何第三方平台的赠送或售卖行为均未获得我司授权,我司保留追究其法律责任的权利!
广告
利用Transformer BEV解决自动驾驶Corner Case的技术原理
时间:
2023-06-19
作者:
汽车电子与软件
阅读:
分享
扫码分享到好友
海报分享
Transformer 作为你一种基于自注意力机制的深度学习模型,最早应用于自然语言处理任务。其核心思想是通过自注意力机制捕捉输入序列中的长距离依赖关系,从而提高模型在处理序列数据上的能力。
自动驾驶系统在实际应用中需要面对各种复杂的场景,尤其是Corner Case(极端情况)对自动驾驶的感知和决策能力提出了更高的要求。Corner Case指的是在实际驾驶中可能出现的极端或罕见情况,如交通事故、恶劣天气条件或复杂的道路状况。BEV技术通过提供全局视角来增强自动驾驶系统的感知能力,从而有望在处理这些极端情况时提供更好的支持。本文将探讨BEV(Bird's Eye View,俯视视角)技术如何帮助自动驾驶系统应对Corner Case,提高系统的可靠性和安全性。
Transformer 作为你一种基于自注意力机制的深度学习模型,最早应用于自然语言处理任务。其核心思想是通过自注意力机制捕捉输入序列中的长距离依赖关系,从而提高模型在处理序列数据上的能力。
将以上两者进行有效结合也是在自动驾驶策略中相当吃香的一门新兴技术。
cc1ednc
BEV的技术优势分析
BEV是一种将三维环境信息投影到二维平面的方法,以俯视视角展示环境中的物体和地形。在自动驾驶领域,BEV 可以帮助系统更好地理解周围环境,提高感知和决策的准确性。在环境感知阶段,BEV 可以将激光雷达、雷达和相机等多模态数据融合在同一平面上。这种方法可以消除数据之间的遮挡和重叠问题,提高物体检测和跟踪的精度。同时,BEV 可以为后续的预测和决策阶段提供清晰的环境表示,有利于提高系统的整体性能。
1、Lidar与BEV技术的比较:
首先,BEV技术能提供全局视角的环境感知,有助于提高自动驾驶系统在复杂场景下的表现。然而,激光雷达在距离和空间信息方面具有更高的精度。
其次,BEV技术通过摄像头捕捉图像,可以获取颜色和纹理信息,而激光雷达在这方面的性能较弱。
此外,BEV技术的成本相对较低,适用于大规模商业化部署。
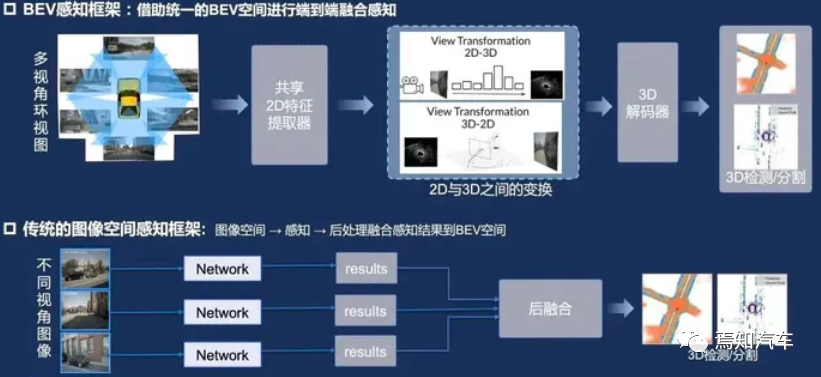
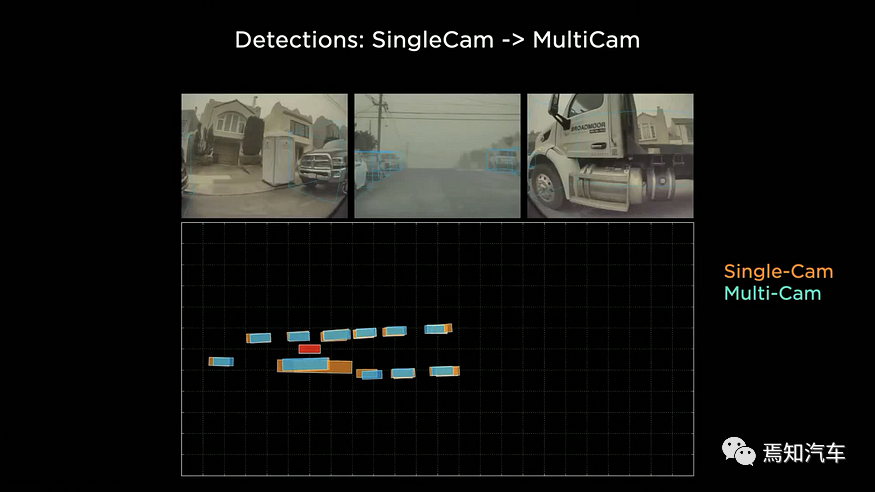
2、BEV技术与传统单视角摄像头的比较
传统单视角摄像头是一种常用的车辆感知设备,可以捕捉车辆周围的环境信息。然而,单视角摄像头在视野和信息获取方面存在一定局限性。BEV技术整合多个摄像头的图像,提供全局视角,可以更全面地了解车辆周围的环境。
BEV技术在复杂场景和恶劣天气条件下,相对于单视角摄像头具有更好的环境感知能力,因为BEV能够融合来自不同角度的图像信息,从而提高系统对环境的感知。
BEV技术可以帮助自动驾驶系统更好地处理Corner Case,如复杂道路状况、狭窄或遮挡的道路等,而单视角摄像头在这些情况下可能表现不佳。
当然在成本和资源占用情况方面,由于BEV需要进行各个视角下的图像感知,重建和拼接,因此是比较耗费算力和存储资源的。虽然BEV技术需要部署多个摄像头,但总体成本仍低于激光雷达,且相对于单视角摄像头在性能上有明显提升。
综上所述,BEV技术在自动驾驶领域与其他感知技术相比具有一定优势。
尤其是在处理Corner Case方面,BEV技术可以提供全局视角的环境感知,有助于提高自动驾驶系统在复杂场景下的表现。
然而,为了充分发挥BEV技术的优势,仍需要进一步研究和开发,以提高图像处理能力、传感器融合技术以及异常行为预测等方面的性能。同时,结合其他感知技术(如激光雷达)以及深度学习和机器学习算法,可以进一步提升自动驾驶系统在各种场景下的稳定性和安全性。
cc1ednc
基于 Transformer 和 BEV 的自动驾驶系统
与此同时,Bird's Eye View (BEV) 作为一种有效的环境感知方法,在自动驾驶系统中发挥着重要作用。结合 Transformer 和 BEV 的优势,我们可以构建一个端到端的自动驾驶系统,实现高精度的感知、预测和决策。本文也将同时探讨 Transformer 和 BEV 在自动驾驶领域如何进行有效结合和应用,以提高系统性能。
具体步骤如下:
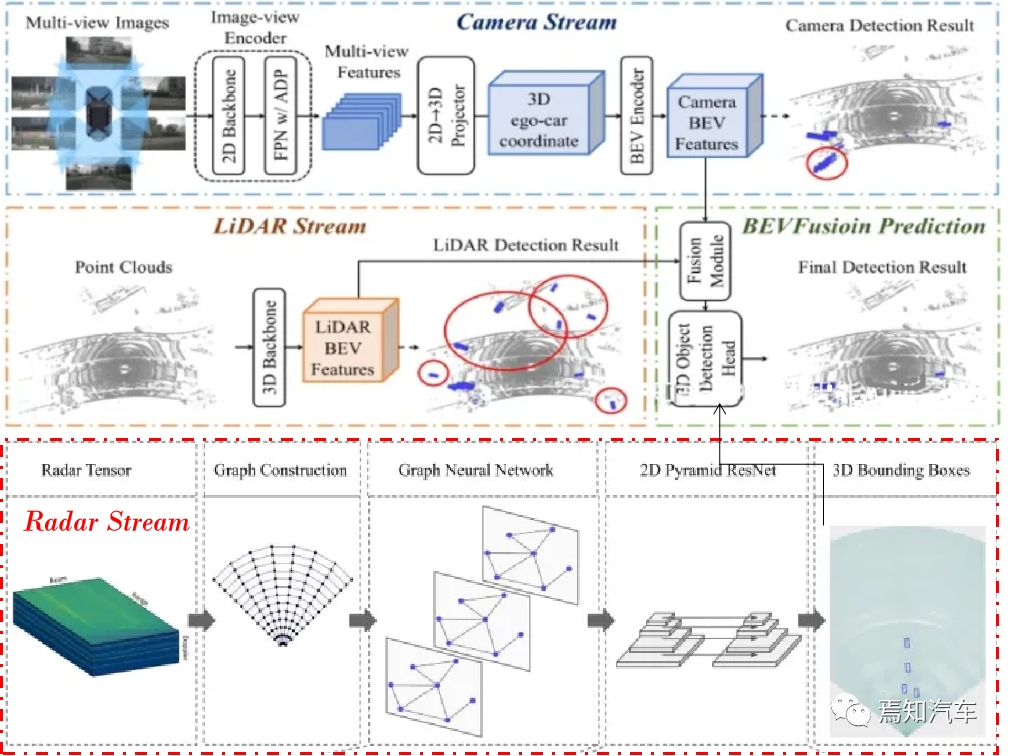
1、数据预处理:
将激光雷达、雷达和相机等多模态数据融合为 BEV 格式,并进行必要的预处理操作,如数据增强、归一化等。
首先,我们需要将激光雷达、雷达和相机等多模态数据转换为 BEV 格式。对于激光雷达点云数据,我们可以将三维点云投影到一个二维平面上,然后对该平面进行栅格化,以生成一个高度图;对于雷达数据,我们可以将距离、角度信息转换为笛卡尔坐标,然后在 BEV 平面上进行栅格化;对于相机数据,我们可以将图像数据投影到 BEV 平面上,生成一个颜色或强度图。
2、感知模块:
在自动驾驶的感知阶段,Transformer 模型可以用于提取多模态数据中的特征,如激光雷达点云、图像、雷达数据等。通过对这些数据进行端到端的训练,Transformer 能够自动学习到这些数据的内在结构和相互关系,从而有效地识别和定位环境中的障碍物。
利用 Transformer 模型对 BEV 数据进行特征提取,实现障碍物的检测和定位。
将这些 BEV 格式的数据叠加在一起,形成一个多通道的 BEV 图像。设激光雷达的 BEV 高度图为 H(x, y),雷达的 BEV 距离图为 R(x, y),相机的 BEV 强度图为 I(x, y),则多通道的 BEV 图像可以表示为:
B(x, y) = [H(x, y), R(x, y), I(x, y)]
其中 B(x, y) 表示多通道 BEV 图像在坐标 (x, y) 处的像素值,[] 表示通道叠加。
3、预测模块:
基于感知模块的输出,使用 Transformer 模型预测其他交通参与者的未来行为和轨迹。通过学习历史轨迹数据,Transformer 能够捕捉到交通参与者的运动模式和相互影响,从而为自动驾驶系统提供更准确的预测结果。
具体的讲,我们首先使用 Transformer 对多通道 BEV 图像进行特征提取。设输入 BEV 图像为 B(x, y),我们可以通过多层自注意力机制和位置编码来提取特征 F(x, y):
F(x, y) = Transformer(B(x, y))
其中 F(x, y) 表示特征图,在坐标 (x, y) 处的特征值。
然后,我们利用提取到的特征 F(x, y) 预测其他交通参与者的行为和轨迹。可以采用 Transformer 的解码器来生成预测结果,如下所示:
P(t) = Decoder(F(x, y), t)
其中 P(t) 表示在时间 t 处的预测结果,Decoder 表示 Transformer 解码器。
通过以上步骤,我们可以实现基于 Transformer 和 BEV 的数据融合与预测。具体的 Transformer 结构和参数设置可以根据实际应用场景进行调整,以达到最佳性能。
4、决策模块:
根据预测模块的结果,结合交通规则和车辆动力学模型,采用 Transformer 模型生成合适的驾驶策略。
通过将环境信息、交通规则和车辆动力学模型整合到模型中,Transformer 能够学习到高效且安全的驾驶策略。如路径规划、速度规划等。此外,利用 Transformer 的多头自注意力机制,可以有效地平衡不同信息源之间的权重,从而在复杂环境中做出更为合理的决策。
以下是采用该方法的具体步骤:
1、数据收集与预处理:
首先,需要收集大量的驾驶数据,包括车辆状态信息(如速度、加速度、方向盘角度等)、路况信息(如道路类型、交通标志、车道线等)、周围环境信息(如其他车辆、行人、自行车等)以及驾驶员采取的操作。对这些数据进行预处理,包括数据清洗、标准化和特征提取。
2、数据编码与序列化:
将收集到的数据编码成适合 Transformer 模型输入的形式。这通常包括将连续的数值数据进行离散化,并将离散化的数据转换成向量形式。同时,需要将数据序列化,以便 Transformer 模型能够处理时序信息。
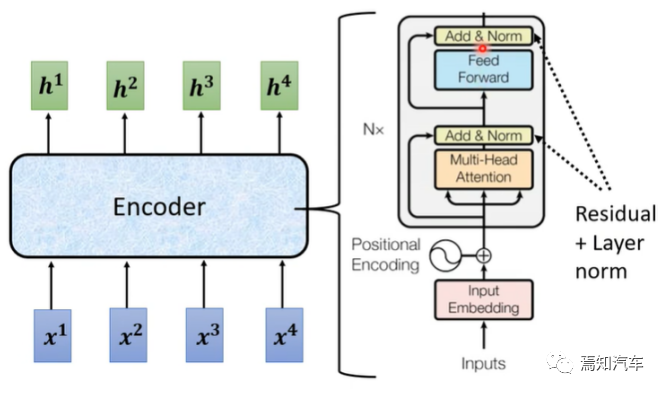
2.1、Transformer 编码器
Transformer 编码器由多层相同的子层组成,每个子层包含两个部分:多头自注意力(Multi-Head Attention)和前馈神经网络(Feed-Forward Neural Network)。
多头自注意力:首先将输入序列分为 h 个不同的头,分别计算每个头的自注意力,然后将这些头的输出拼接在一起。这样可以捕捉输入序列中不同尺度的依赖关系。
多头自注意力的计算公式为:
MHA(X) = Concat(head_1, head_2, ..., head_h) * W_O
其中 MHA(X) 表示多头自注意力的输出,head_i 表示第 i 个头的输出,W_O 是输出权重矩阵。
前馈神经网络:接下来,将多头自注意力的输出传递给前馈神经网络。前馈神经网络通常包含两层全连接层和一个激活函数(如 ReLU)。前馈神经网络的计算公式为:
FFN(x) = max(0, xW_1 + b_1) * W_2 + b_2
其中 FFN(x) 表示前馈神经网络的输出,W_1 和 W_2 是权重矩阵,b_1 和 b_2 是偏置向量,max(0, x) 表示 ReLU 激活函数。
此外,编码器中的每个子层都包含残差连接和层归一化(Layer Normalization),这有助于提高模型的训练稳定性和收敛速度。
2.2、Transformer 解码器
与编码器类似,Transformer 解码器也由多层相同的子层组成,每个子层包含三个部分:多头自注意力、编码器-解码器注意力(Encoder-Decoder Attention)和前馈神经网络。
多头自注意力:
与编码器中的多头自注意力相同,用于计算解码器输入序列中各个元素之间的关联程度。
编码器-解码器注意力:
用于计算解码器输入序列与编码器输出序列之间的关联程度。其计算方法与自注意力类似,只是查询向量来自解码器输入序列,而键向量和值向量来自编码器输出序列。
前馈神经网络:
与编码器中的前馈神经网络相同。解码器中的每个子层同样包含残差连接和层归一化。通过多层编码器和解码器的堆叠,Transformer 能够处理具有复杂依赖关系的序列数据。
3、构建 Transformer 模型:
构建一个适用于自动驾驶场景的 Transformer 模型,包括设置合适的层数、头数和隐藏层大小。此外,还需要根据任务需求对模型进行微调,如使用驾驶策略生成任务的损失函数。
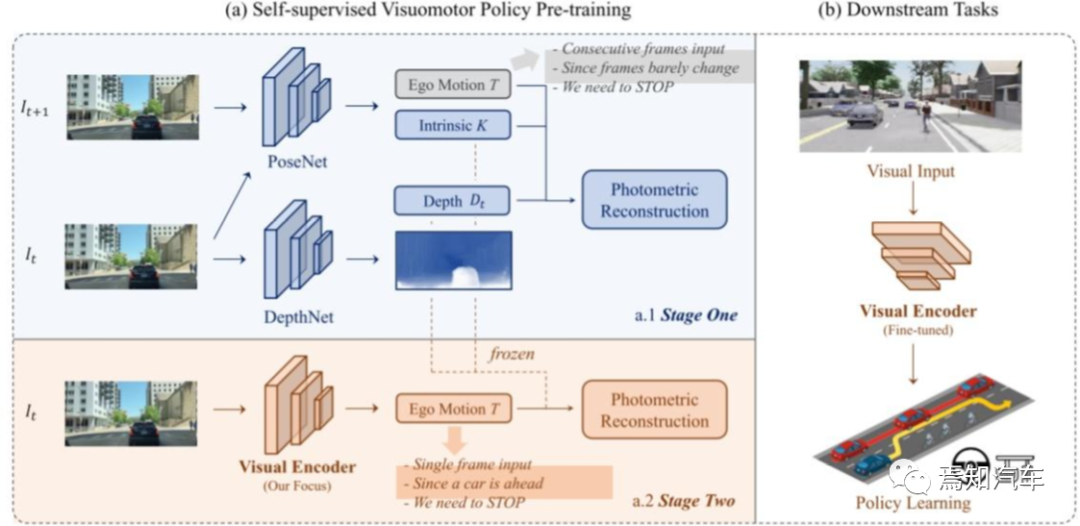
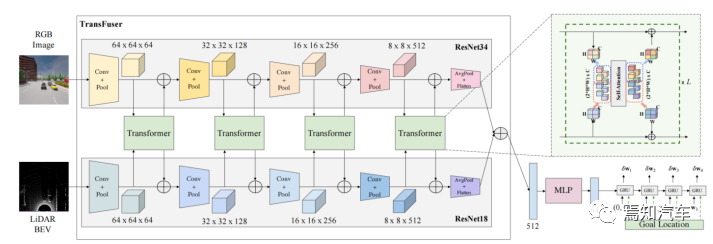
首先将特征向量通过MLP得到低维向量,传递到由GRU实现的自动回归路径点网络,并用其初始化GRU的隐状态。此外当前位置和目标位置也被输入,使网络关注隐状态的相关上下文。
使用单层GRU,用线性层从隐状态预测路径点偏移量
,得到预测路径点
。GRU的输入是原点。
控制器根据预测路径点,使用两个PID控制器分别进行横向和纵向控制,获得转向、刹车和油门值。将连续帧路径点向量进行加权平均,则纵向控制器的输入为其模长,横向控制器的输入为其朝向。
计算当前帧自车坐标系下的专家轨迹路径点和预测轨迹路径点的L1损失,即
4、训练与验证:
使用收集到的数据集对 Transformer 模型进行训练。在训练过程中,需要对模型进行验证以检查其泛化能力。可以将数据集划分为训练集、验证集和测试集,以便对模型进行评估。
5、驾驶策略生成:
在实际应用中,根据当前车辆状态、路况信息和周围环境信息输入预训练的 Transformer 模型。模型将根据这些输入生成驾驶策略,如加速、减速、转向等。
6、驾驶策略执行与优化:
将生成的驾驶策略传递给自动驾驶系统,以控制车辆。同时,收集实际执行过程中的数据,用于模型的进一步优化和迭代。
通过以上步骤,可以采用基于 Transformer 模型的方法在自动驾驶决策阶段生成合适的驾驶策略。需要注意的是,由于自动驾驶领域的安全性要求较高,实际部署时需确保模型在各种场景下的性能和安全性。
cc1ednc
Transformer+BEV技术解决Corner Case的实例
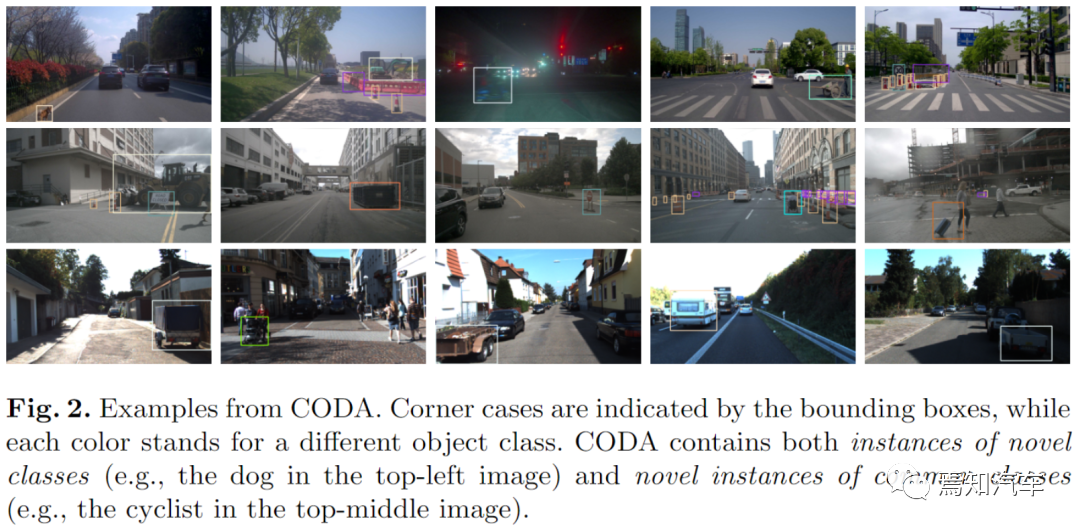
在本部分中,我们将详细介绍三个BEV技术解决Corner Case的实例,分别涉及复杂道路状况、恶劣天气条件和预测异常行为。如下图分别表示了自动驾驶中的一些Cornercase场景。采用Transformer+BEV的技术可以有效的识别及应对大部分当前所能识别出的边缘场景。
1、处理复杂道路状况
在复杂道路状况下,如交通拥堵、复杂的路口或者不规则的路面,Transformer+BEV技术可以提供更全面的环境感知。通过整合车辆周围多个摄像头的图像,BEV生成一个连续的俯视视角,使得自动驾驶系统能够清晰地识别车道线、障碍物、行人和其他交通参与者。例如,在一个复杂的路口,BEV技术能帮助自动驾驶系统准确识别各个交通参与者的位置和行驶方向,从而为路径规划和决策提供可靠依据。
2、应对恶劣天气条件
在恶劣天气条件下,如雨、雪、雾等,传统的摄像头和激光雷达可能会受到影响,降低自动驾驶系统的感知能力。Transformer+BEV技术在这些情况下仍具有一定优势,因为它可以融合来自不同角度的图像信息,从而提高系统对环境的感知。为了进一步增强Transformer+BEV技术在恶劣天气条件下的性能,可以考虑采用红外摄像头或者热成像摄像头等辅助设备,以补充可见光摄像头在这些情况下的不足。
3、预测异常行为
在实际道路环境中,行人、骑行者和其他交通参与者可能会出现异常行为,如突然穿越马路、违反交通规则等。BEV技术可以帮助自动驾驶系统更好地预测这些异常行为。借助全局视角,BEV可以提供完整的环境信息,使得自动驾驶系统能够更准确地跟踪和预测行人和其他交通参与者的动态。此外,结合机器学习和深度学习算法,Transformer+BEV技术可以进一步提高对异常行为的预测准确性,从而使自动驾驶系统在复杂场景中做出更为合理的决策。
4、狭窄或遮挡的道路
在狭窄或遮挡的道路环境中,传统的摄像头和激光雷达可能难以获取足够的信息来进行有效的环境感知。然而,Transformer+BEV技术可以在这些情况下发挥作用,因为它可以整合多个摄像头捕获的图像,生成一个更全面的视图。这使得自动驾驶系统能够更好地了解车辆周围的环境,识别狭窄通道中的障碍物,从而安全地通过这些场景。
5、并车和交通合流
在高速公路等场景中,自动驾驶系统需要应对并车和交通合流等复杂任务。这些任务对自动驾驶系统的感知能力提出了较高要求,因为系统需要实时评估周围车辆的位置和速度,以确保安全地进行并车和交通合流。借助Transformer+BEV技术,自动驾驶系统可以获得一个全局视角,清晰地了解车辆周围的交通状况。这将有助于自动驾驶系统制定合适的并车策略,确保车辆安全地融入交通流。
6、紧急情况应对
在紧急情况下,如交通事故、道路封闭或突发事件,自动驾驶系统需要快速做出决策以确保行驶安全。在这些情况下,Transformer+BEV技术可以为自动驾驶系统提供实时、全面的环境感知,帮助系统迅速评估当前的道路状况。结合实时数据和先进的路径规划算法,自动驾驶系统可以制定合适的应急策略,避免潜在的风险。
通过这些实例,我们可以看到Transformer+BEV技术在应对Corner Case时具有很大的潜力。然而,为了充分发挥Transformer+BEV技术的优势,仍需要进一步研究和开发,以提高图像处理能力、传感器融合技术以及异常行为预测等方面的性能。
cc1ednc
结论
本文总结了Transformer和BEV技术在自动驾驶中的原理和应用,特别是如何解决Corner Case问题。通过提供全局视角和准确的环境感知,Transformer+BEV技术有望提高自动驾驶系统在面对极端情况时的可靠性和安全性。然而,当前的技术仍存在一定的局限性,例如在恶劣天气条件下的性能下降。未来的研究应继续关注BEV技术的改进和与其他感知技术的融合,以实现更高水平的自动驾驶安全性。
责编:Ricardo
文章来源及版权属于汽车电子与软件,EDN电子技术设计仅作转载分享,对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如有疑问,请联系
Demi.xia@aspencore.com
阅读全文,请先
汽车电子与软件
汽车电子与软件
进入专栏
分享到:
返回列表
上一篇:
汽车的盲区这么大?“贴心”科技帮你解决
下一篇:
拆解报告:倍思优塔ioTa随行电户外移动电源450W
微信扫一扫
一键转发
最前沿的电子设计资讯
请关注
“电子技术设计微信公众号”
推荐内容
兴趣推荐
机器人行业大鱼:ABB机器人业务分拆上市
ABB集团分拆机器人业务并推动其独立上市,是对全球机器人行业变革和集团战略优化的积极响应···
拆解报告:华为120W 6A编织数据线
华为这款6A编织数据线与此前拆解的7A规格的为同一系列设计,外观时尚精致,加上甄选定制纱线编织的外被,带来更高
拆解报告:TRÜKE充客HB008颈挂式运动耳机
TRÜKE充客HB008颈挂式运动耳机在外观方面,采用了全新的设计,佩戴舒适稳定,质感更加出众。颈带采用了扁平设计,
新加坡2025年3月:比亚迪领跑,中国品牌崛起
2025年3月,新加坡汽车市场在电动车热潮的推动下实现23.5%的强劲增长,比亚迪以18.8%的市场份额稳居榜首,小鹏、
拆解报告:多功能手势触控板
本期拆解的多功能手势触控板具备蓝牙连接,无线接收器连接和有线连接三种连接方式,适配Windows和macOS电脑使用
汽车数字孪生:边缘计算带来更好的智能驾驶应用场景
汽车数字孪生技术在边缘计算的赋能下,为智能交通带来了革命性机遇。
评测:BOYALINK专业无线领夹麦克风
BOYALINK专业无线领夹麦克风使用方便,即插即用的使用门槛低。产品配备三个转接头,转接头更换方式简单,能够快速
瑞典2025年4月:沃尔沃王者归位,特斯拉跌落神坛
2025年4月的瑞典市场,再次验证了“电动优先”的发展路径。在本土品牌沃尔沃强势回归与德系车集体突进的夹击
拆解报告:迈源电气3500W新能源汽车车载充电机
迈源电气新能源汽车车载充电机支持3500W输出功率,为220V交流输入,输出电压范围为250-500V,最大输出电流为10A,充
评测:MORROR ART X1 VWS耳机
MORROR ART X1 VWS显示蓝牙耳机是一款头戴式无线耳机,为全方位了解该耳机的实际表现,我爱音频网对该耳机进行
丰田2025财报解读:坚守制造业本质和移动出行生态
丰田在电动化时代,如何考虑电动、智能、互联和生态于一体的科技型公司,我们持续关注下。这家日本车企和我们看
欧洲汽车市场2025年一季度分析:电动化加速
2025年第一季度,欧盟汽车市场呈现出鲜明的两极分化趋势:电动化浪潮推动纯电动和混合动力汽车市场份额快速提升
100个射频笔试面试常见问题及答案
100个射频面试常见问题及答案,涵盖基础知识、项目经验、技术技能等多个方面···
英国车市4月鏖战,销量下滑与中国品牌强势突围
2025年4月,英国新车市场遭遇寒潮,同比下滑10.4%,多年来首现连续回调之势。在整体市场低迷的背景下,电动车细分市
腾讯智慧出行方案:车云一体+高性能算力双重战略
腾讯智慧出行以高性能算力、精准数据闭环和可迭代AI模型为核心,通过“腾讯混元+DeepSeek”双引擎和车云一体
拆解报告:OnePlus一加Buds Ace 2真无线降噪耳机
一加Buds Ace 2真无线降噪耳机在外观方面,整体质感得到了大幅提升。充电盒采用了星环设计,新一代喷涂工艺,具备
马来西亚2025年3月:纯电车型表现不错!
2025年3月马来西亚汽车市场在开斋节促销推动下实现2%增长,但第一季度TIV下降7.4%,预示着全年销量将回落至75万
大象转身:大陆集团拆分,Aumovio的智驾技术路线
大陆集团30年在中国的本土化进程,从最初的工厂设立,到今天的本土研发、产品定义与技术合作深度融合,在软件定义
利润跳水、成本瘦身,沃尔沃如何撑起电动化与区域化?
2025年对沃尔沃而言,是极其关键的一年。一方面,必须面对利润承压、市场动荡、电动化红利延迟兑现的现实;另一方
拆解报告:aigo爱国者S21无线领夹麦克风
aigo爱国者S21无线领夹麦克风在外观方面,整体体积在主流产品中较为轻巧,提供了更好的便携性。麦克风采用了长
2025松山湖中国IC创新高峰论坛:继续聊聊机器人
去年的主题是智慧机器人,今年的主题仍然聚焦于机器人身上,不过变为了具身智慧机器人……
鹏瞰TS-PON Gen2芯片,用光协议重塑机器人“神经网络”?
TS-PON Gen2芯片是一款灵活的软件定义 SoC,适用于多种场景。它基于无源光网(PON)技术,具备高带宽(目前10G,未来
让人形机器人“耳聪目明”,昆泰芯KTM5900磁性编码器解析
编码器芯片作为机器人的核心传感器之一,对于提升机器人的感知能力、安全性和生产效率具有重要意义···
如何让具身机器人“看”得清?思特威给出了这个答案
相比于滚动快门传感器,全局快门传感器能够同时曝光整个画面,有效避免了运动过程中产生的图像形变,为机器视觉提
广告
热门评论
最新评论
换一换
换一换
广告
热门推荐
广告
广告
EE直播间
更多>>
在线研讨会
更多>>
学院
录播课
直播课
更多>>
更多>>
更多>>
更多>>
广告
最新下载
最新帖子
最新博文
面包芯语
更多>>
热门TAGS
产业前沿
消费电子
技术实例
EDN原创
电源管理
新品
汽车电子
处理器/DSP
通信
传感器/MEMS
模拟/混合信号/RF
工业电子
制造/工艺/封装
无线技术
人工智能
安全与可靠性
EDA/IP/IC设计
测试与测量
查看更多TAGS
广告
×
向右滑动:上一篇
向左滑动:下一篇
我知道了



 ,得到预测路径点
,得到预测路径点 。GRU的输入是原点。
。GRU的输入是原点。


 最前沿的电子设计资讯
最前沿的电子设计资讯

