Nhgednc
双足人形机器人是一种能够模仿人类行走的机器人,具有广泛的应用前景,例如在危险或复杂的环境中执行任务,或者在日常生活中提供服务。双足人形机器人的腿部设计是其性能的关键组成部分,涉及到腿部构型、关节执行器硬件和运动控制软件的设计。在这一复杂的系统工程中,腿部设计直接影响机器人的适应性、能效和稳定性。本文将介绍双足人形机器人腿部设计的原则、分类和发展趋势,以及一些典型的实例。Nhgednc
 Nhgednc
Nhgednc
 Nhgednc
Nhgednc
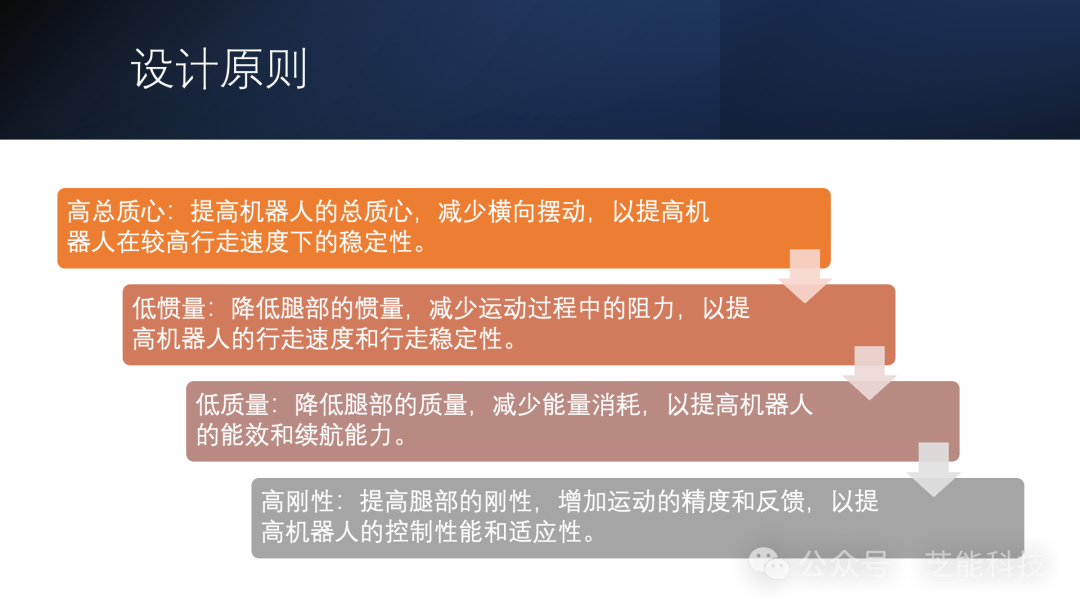
双足人形机器人腿部设计应遵循提高腿部高动态响应能力的总要求。高动态响应能力意味着机器人能够快速、灵活、准确地执行各种复杂的运动,如行走、跑跳、蹲起、爬起等。为了实现高动态响应能力,腿部设计需要满足以下几个准则:Nhgednc
● 高总质心:提高机器人的总质心,减少横向摆动,以提高机器人在较高行走速度下的稳定性。
● 低惯量:降低腿部的惯量,减少运动过程中的阻力,以提高机器人的行走速度和行走稳定性。
● 低质量:降低腿部的质量,减少能量消耗,以提高机器人的能效和续航能力。
● 高刚性:提高腿部的刚性,增加运动的精度和反馈,以提高机器人的控制性能和适应性。
 Nhgednc
Nhgednc
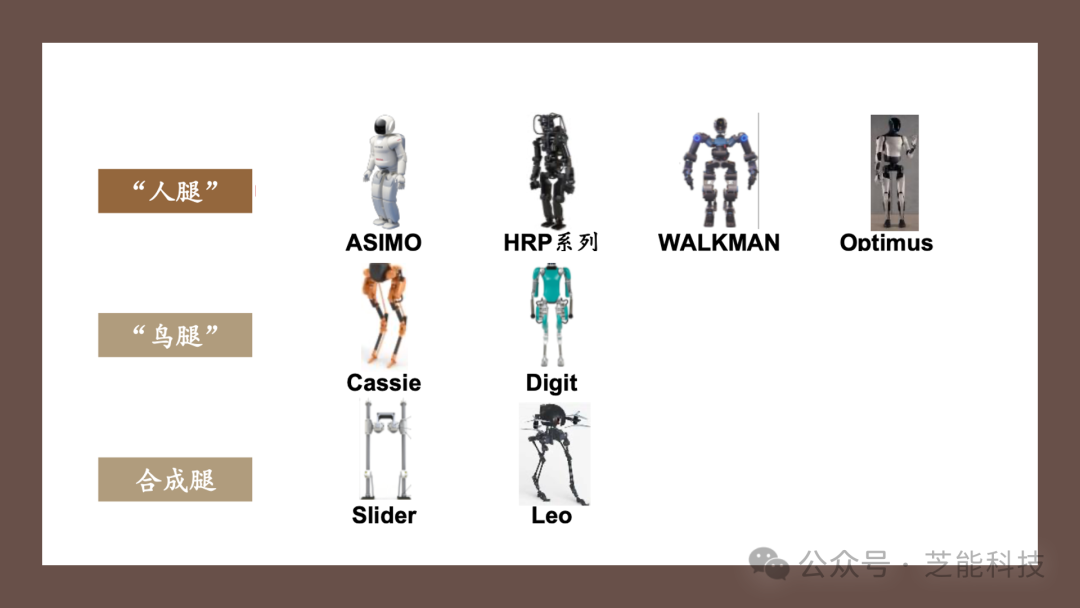
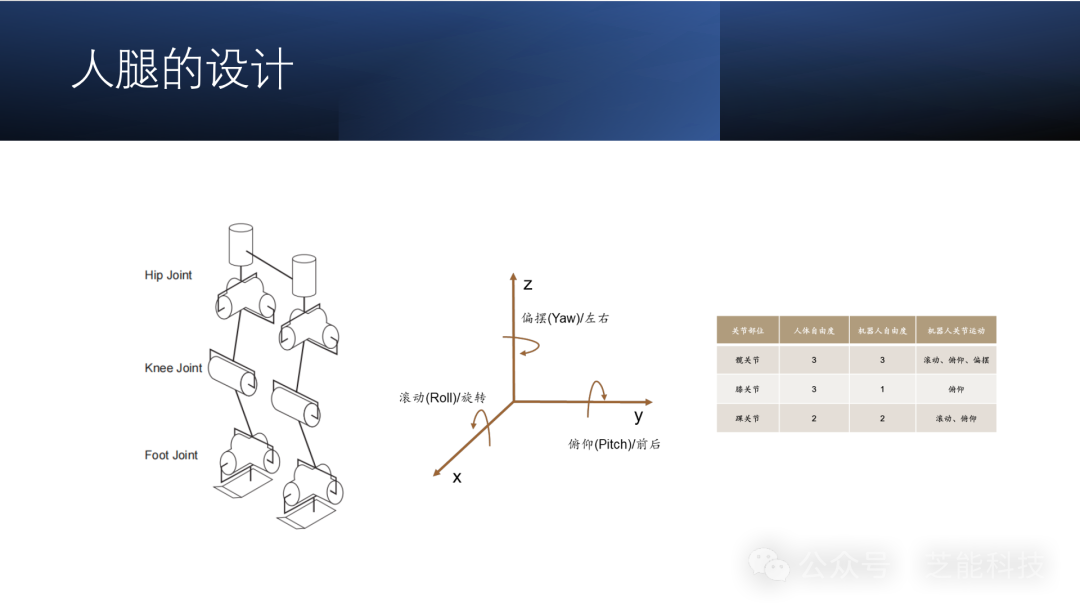
按照生物学模式,双足人形机器人腿部设计可分为“人腿”、“鸟腿”和合成腿,其中大多数双足机器人采用“人腿”方案,受到人体生物学结构的启发。尽管与人类运动模式存在差异,膝盖弯曲的设计有助于确保机器人的姿态非奇异,优化控制性能,并在行走过程中保持稳定的步伐。Nhgednc
 Nhgednc
Nhgednc
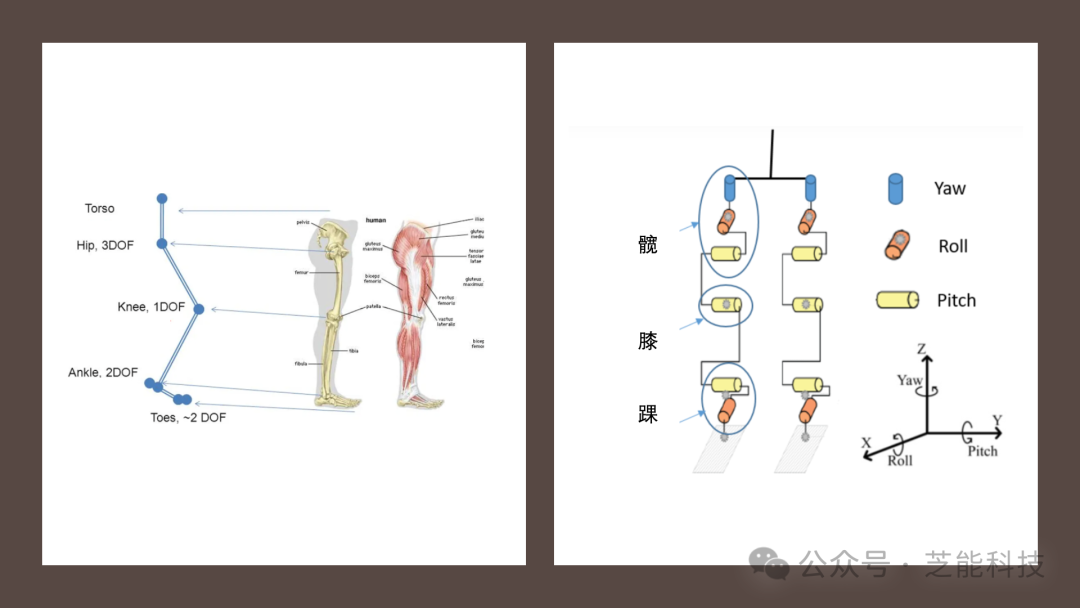
“人腿”构型的自由度分布为髋关节3DOF、膝关节1DOF、踝关节2DOF,模拟人类下半身运动自由度。这样的设计能够近似人类的形态和功能,使机器人在运动时更加灵活、具有更好的通用性。Nhgednc
 Nhgednc
Nhgednc
按照选用的机构类型,将“人腿”构型进一步分为串联、并联和串并联混合三种类型。这些类型的区别在于驱动器的位置和传动方式的不同,影响机器人的惯量、刚度、负载能力等性能指标。Nhgednc
● 串联机构:由多个连杆通过运动副连接成首尾不封闭的机构,每个关节由其驱动器独立驱动。这种机构结构简单、易于控制、工作空间大,但其定位精度较低、惯量大、刚度低,动力学性能较差,与腿部设计准则相背离。
● 并联机构:由多个连杆首尾连接形成封闭的机构,多个关节由共同的驱动器驱动。这种机构能够将腿部执行器上移,以此减小腿部惯量,定位精度、刚度、负载能力都能得到提高,但要以机构复杂程度、控制难度增加为代价。
● 串并联混合机构:同时采用串联和并联两种机构,结合串联和并联两者的优势,但缺点是机构复杂性和控制难度进一步增加。
实际设计人腿的时候,要注意!Nhgednc
 Nhgednc
Nhgednc
● 髋关节机构设计:髋关节在行走和站立中起关键作用。为了模拟其自然运动,可采用弹性体三自由度外骨骼机器人髋关节结构,基于人机动力学的设计,通过平行结构提高行走自由度,需考虑人机工程学和人体步态运动规律。
● 膝关节机构设计:膝关节在行走和跑步中承担支撑和缓冲作用。四连杆机构因稳定性被广泛采用,能较好模拟膝关节非定轴转动过程,适应不同运动需求的设计。
● 踝关节机构设计:踝关节在步行中负责复杂运动。基于凸轮机构的设计旨在完成主要运动任务。
目前,双足人形机器人的腿部设计已经取得了一定的进展,但仍面临一些挑战。未来的发展趋势可能包括:Nhgednc
● 优化腿部构型,提高机器人的动态响应能力。目前,双足机器人的腿部构型还没有达到人类骨骼肌肉的运动能力水平,因此需要在腿部构型、硬件和软件方面不断优化,以提高机器人的运动性能和适应性。
● 引入新的机构和材料,提高机器人的能效和稳定性。目前,双足机器人的能耗和稳定性还有待提高,因此需要引入新的机构和材料,如弹性驱动、柔性关节、智能材料等,以提高机器人的能效和稳定性。
● 拓展应用领域,提高机器人的实用性和普及性。目前,双足机器人的应用领域还比较有限,因此需要拓展应用领域,如在恶劣条件、危险场景作业的服务特种领域,3C、汽车等制造业,以及医疗、家政等民生领域,以提高机器人的实用性和普及性。
双足人形机器人的腿部设计是一个综合性的工程,需要在构型、硬件和软件方面精心设计,以提高机器人的性能和适应性。目前,双足机器人的腿部设计已经取得了一定的进展,但仍面临一些挑战。未来的发展方向包括优化腿部构型,提高机器人的动态响应能力,进一步拓展其应用领域。Nhgednc
责编:Ricardo

 最前沿的电子设计资讯
最前沿的电子设计资讯

