
速度规划模块作为运动规划子系统的重要功能,直接影响到下游纵向控制层的执行优劣,不适当的目标速度和加速度会超出车辆运动的极限工况,且影响到驾乘人员的安全性和舒适性体验。
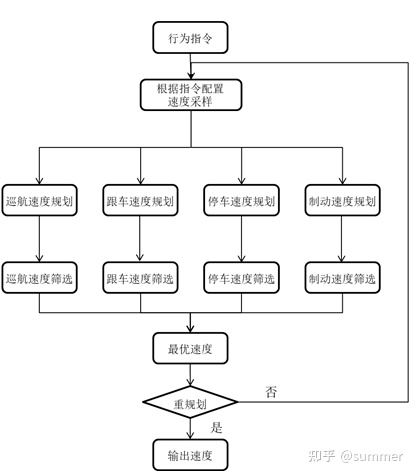
巡航速度采样:
当上游行为规划层发现周围道路环境良好时,发出定速巡航的行为指令后,则本车获取当前状态的位置、速度和加速度,以及目标状态的期望速度和加速度;
跟车速度采样:
当上游行为规划层发现前方行驶的目标障碍物时,发出跟车的行为指令后,则本车获取当前状态的位置、速度和加速度,以及目标状态的期望距离、速度和加速度;
其中,通过设定跟车时距,即目标速度:

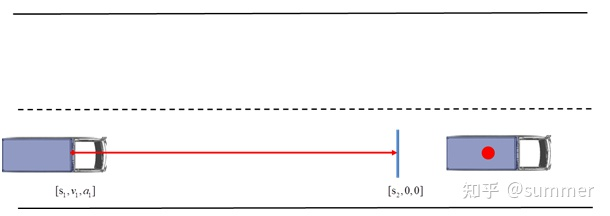
定点停车速度采样:
当上游行为规划层发现前方静止的目标障碍物时,发出停车的行为指令后,则本车获取当前状态的速度和加速度,以及目标状态的停车距离和速度;
紧急制动速度采样:
当上游行为规划层突然发现目标障碍物切入时,发出紧急刹车的行为指令后,则本车获取当前状态速度,以及目标状态的停车距离、速度;
通过设定紧急制动时距,即目标距离,保证最终的刹车距离稳定在安全距离内。
以上场景下,需要考虑驾驶行为、路况、限速等因素,通常情况下用一个期望车辆保持的驾驶速度来约束整个纵向速度规划过程。
即自动驾驶车辆从 时刻开始速度规划至完成时刻,则在这段时间内,需要不断地实时更新速度曲线。自动驾驶车辆实时规划从当前位置到目标位置的速度和加速度等参数,输出给控制执行系统。当到达目标速度时,则反馈给行为规划层已完成相应的状态指令。
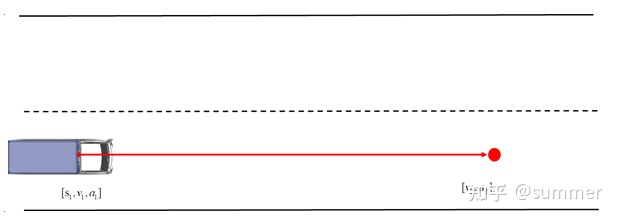
巡航
当上游行为规划层发现周围道路环境良好时,发出自适应巡航的行为指令后,则本车获取当前状态的位置、速度和加速度,以及目标状态的期望速度和加速度,进行自适应巡航。即车辆只需要从当前车速平滑的加速或减速到目标速度,没有距离的约束。
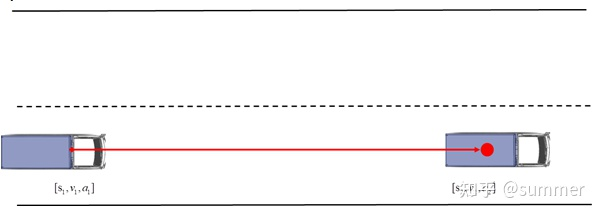
跟车
当上游行为规划层发现前方行驶的目标障碍物时,发出跟车的行为指令后,则本车获取当前状态的位置、速度和加速度,以及目标状态的期望速度和加速度,进行自适应跟车。即车辆需要在目标距离内,从当前车速平滑的加速或减速到目标障碍物速度。

进行速度规划的同时,需要判断是否符合车辆运动和道路等限制,判断内容包括:
(a)s 方向上的车辆位移必须单调递增;
(b)s 方向上的速度是否超过设定的最大限速;
(c)s 方向的加速度是否超过设定的最大加速度限制;
位移约束
对于自动驾驶车辆而言,通常考虑车辆纵向的位移必须单调递增,即不能出现倒车现象:
速度约束
为了达到设定目标点的速度 ,车辆最大最小速度的上下界约束为:
加速度约束
加速度是速度对时间的导数,表示速度的变化率,即s方向的加速度是否超过设定的最大加速度。采用加速度的最大值来保留出加速度较小的路径,淘汰加速度较大的路径。
从当前点到达设定目标点规划的加速度 ,车辆加减速度的上下界约束为:
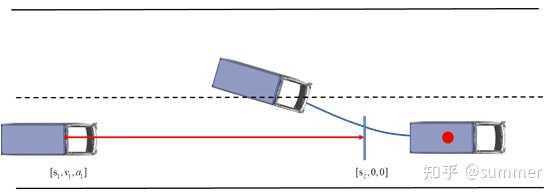
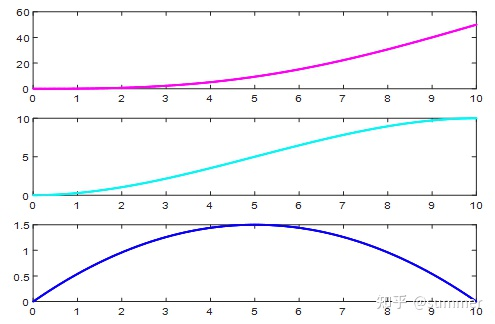
在获取到当前点的状态(坐标、速度、加速度)和目标点的状态(纵向距离、速度、加速度)后,进行速度规划生成满足位移、速度和加速度等约束条件的最优曲线,将对应的值输出给纵向控制。
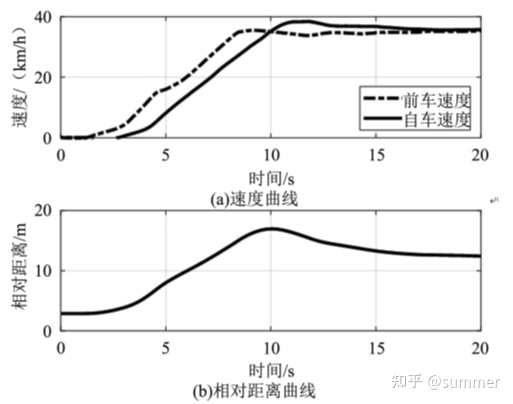
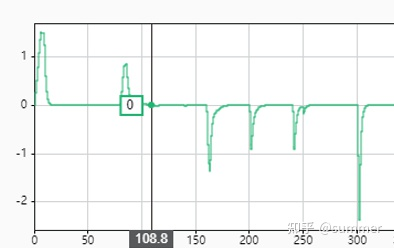
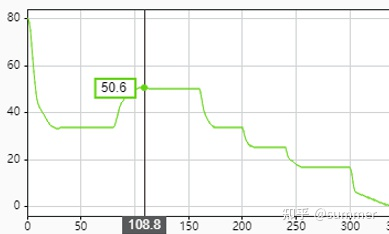
动态跟车仿真如下图所示,当车辆进入自动驾驶的跟车模式时,前车速度起步加速到36km/h,本车开始加速跟随前车,最后速度和距离保持相对稳定状态。

 最前沿的电子设计资讯
最前沿的电子设计资讯

