
随着特斯拉要进入L4的领域,自动驾驶技术又受到关注。
L4的自动驾驶并非无所不能,应用和发展受到一定的限制和约束,这些限制和约束通常被概括为ODD(Operational Design Domain,运行设计域)。
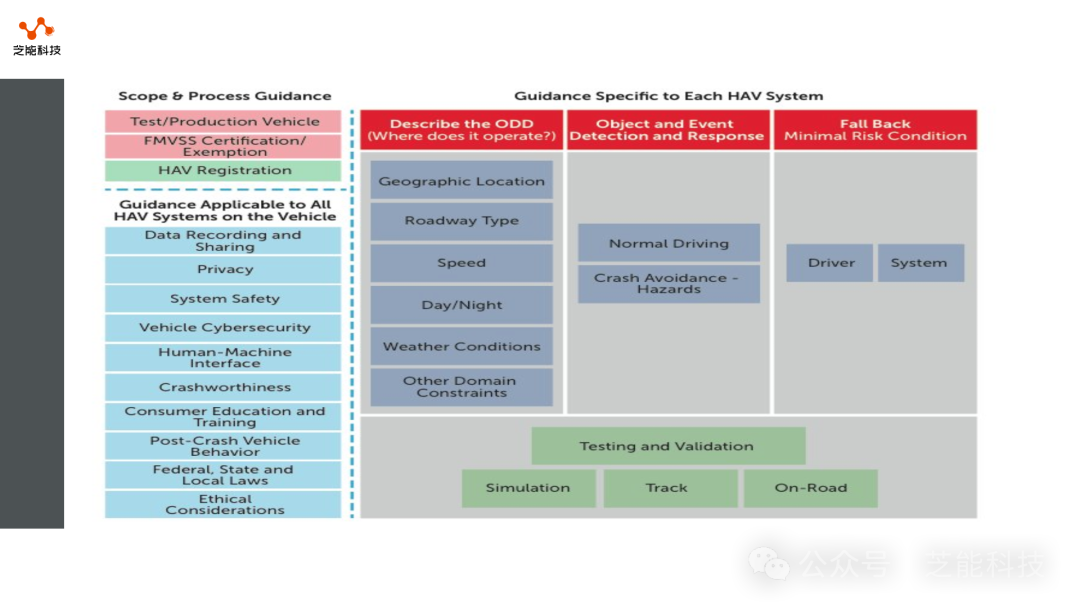
ODD定义了自动驾驶系统可以安全运行的具体环境和条件。包括:道路类型、交通状况、天气条件、光照条件等。ODD的明确界定对于确保自动驾驶系统的安全性至关重要。
● 车辆状态:自动驾驶车辆的状态涉及到车辆的硬件和软件配置,包括传感器的性能、计算平台的可靠性、执行机构的响应速度等,车辆状态的稳定性和可靠性直接关系到自动驾驶系统能否在预定的ODD内正常工作。
● 驾乘人员状态:自动驾驶技术的目标是减少或消除人类驾驶员的参与,但在当前的技术和法规框架下,驾乘人员的状态仍是考量因素。这包括驾驶员对于自动驾驶系统的信任程度、对于突发情况的应对能力等。在某些情况下,自动驾驶系统可能需要驾驶员随时准备接管控制权。
ODD的确立和遵守,有助于自动驾驶系统在预定的环境和条件下正常工作,同时也为用户、制造商和测试机构提供了清晰的指导和标准,通过用户手册了解自动驾驶系统在特定条件下的运行情况,车企可以依据ODD制定产品的功能和安全标准,测试机构可以据此制定安全测试用例并出具认可性的测试报告。
在中国,自动驾驶行业的快速发展催生了对适应国情的ODC标准的需求。国标委发布的《自动驾驶系统设计运行条件白皮书》为制定国家标准提供了参考,其中提出了包括静态物体、环境条件、动态实体等在内的ODD构建框架,以及车辆状态和驾乘人员状态的具体要求。

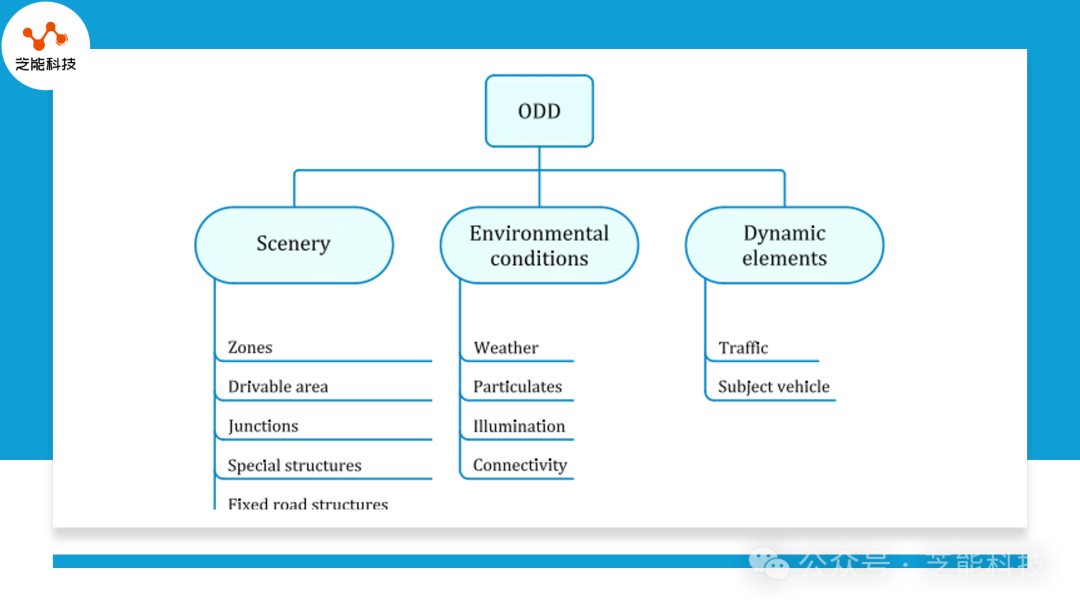
ODD框架的分类通常包括以下几个主要方面:
● 基础设施:涉及自动驾驶系统能够运行的道路类型、道路表面、道路边缘和道路几何等。例如,不同类型的道路(如高速公路、城市道路、乡村道路)和道路表面条件(如沥青、混凝土、砂石)都会影响自动驾驶系统的设计和运行。
● 驾驶操作限制:包括速度限制和交通条件等。这些限制定义了自动驾驶系统在特定道路和交通状况下的操作范围,如限速区域、拥堵路段、事故现场等。
● 周边物体:涉及影响自动驾驶系统感知和定位的物体,包括标志标牌、道路使用者(如其他车辆、行人)和非道路使用者物体(如动物、障碍物)。
● 连接性:指车辆与其他车辆、基础设施、交通管理系统等的通信能力。这包括基于V2V(车对车)、V2I(车对基础设施)和V2N(车对网络)的技术实现的协同工作。
● 环境条件:涉及自动驾驶系统在不同天气条件(如雨、雪、雾)和环境因素(如温度、湿度)下的运行能力。
● 区域:定义了自动驾驶系统在特定地理区域内的限制,如学校区域、施工区、交通管制区等。
所以ODD框架是用来描述自动驾驶系统(ADS)设计时确定的适用于其功能运行的外部环境条件的结构化方法。
ODD框架的目的是为了确保自动驾驶系统在特定的环境和条件下能够安全、有效地运行,包括了一系列的分类和子分类,每个分类都定义了自动驾驶系统能够处理的特定条件和场景。
我们将根据后续的内容,具体介绍整个智能驾驶的核心奥义。
ODC为自动驾驶技术的法力边界提供了明确的界定。通过理解ODD的组成要素,我们可以更好地认识到自动驾驶技术的优势和局限,从而推动其在安全和可控的前提下发展和应用。
 最前沿的电子设计资讯
最前沿的电子设计资讯

