
特斯拉智能驾驶技术一直是行业内的热点话题,其智能驾驶系统经历了三个阶段的演进,从基础建设期到全面自研期,特斯拉不断突破技术边界。
本文将介绍特斯拉自动驾驶技术的发展历程,硬件迭代,以及创新的算法和数据获取方式。
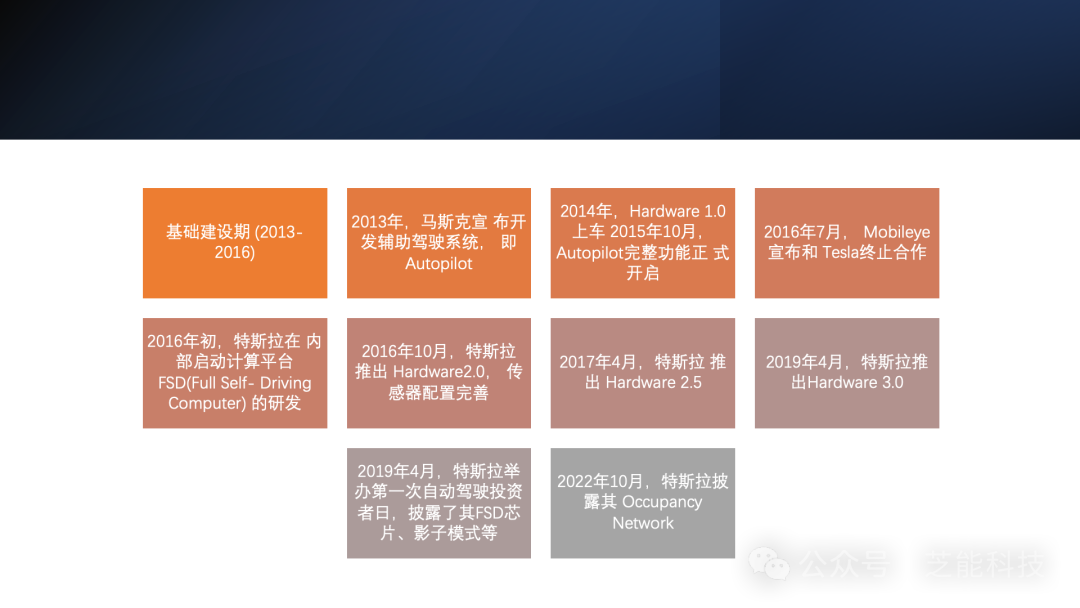
● 基础建设期 (2013-2016)
在这个阶段,特斯拉着重于建设基础设施。2013年,特斯拉宣布开发辅助驾驶系统Autopilot。2014年,硬件1.0上车,由Mobileye提供硬件和软件支持。然而,2016年的一起事故使得Autopilot陷入争议,随后特斯拉与Mobileye合作宣告终止。
● 自研过渡期 (2016-2019)
特斯拉在2016年初启动了全新计算平台FSD(Full Self-Driving Computer)的研发,标志着自研时代的开始。在2016年10月,硬件2.0推出,传感器配置进一步完善。2017年4月,特斯拉发布Hardware 2.5。自研算法的能力逐渐超越Mobileye。
● 全面自研期 (2019-至今)
2019年4月,特斯拉推出了Hardware 3.0,标志着全面自研时代正式启动。
2023年3月,HW4.0低调上车,FSD芯片升级至2.0。2024年1月,特斯拉FSD v12开始向用户推送,实现了城市街道驾驶堆栈的端到端神经网络升级。
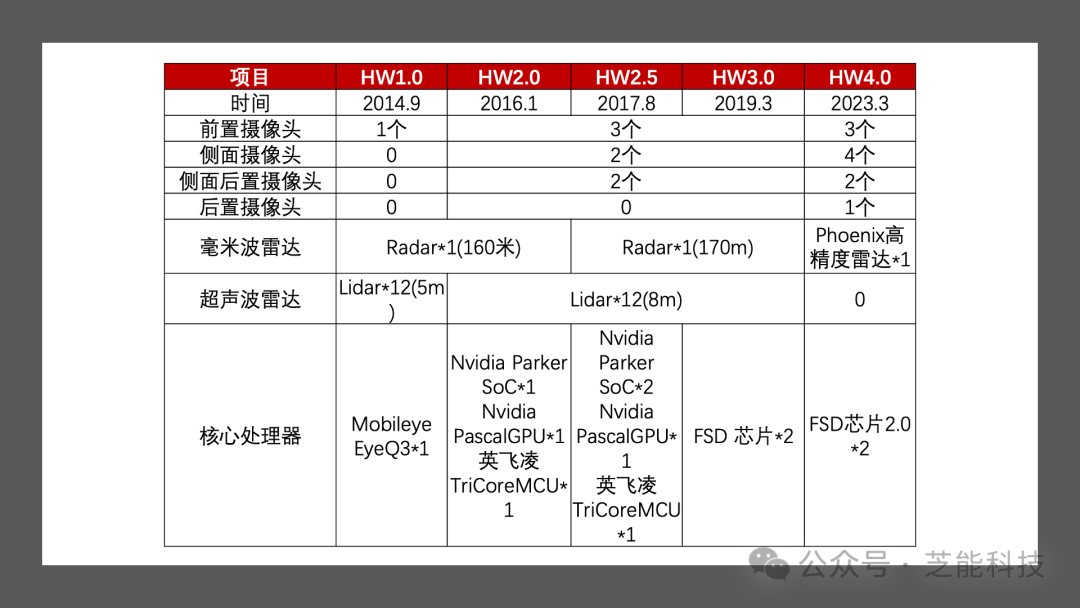
在这个过程中,特斯拉自动驾驶技术的硬件迭代是很重要的。特斯拉自动驾驶技术的硬件迭代经历了多个版本,从HW1.0到HW4.0,硬件配置和性能不断提升。特斯拉各个不同版本的前置、侧面和后置摄像头、雷达、激光雷达等传感器的变化。
● 特斯拉数据获取: 影子模式
特斯拉通过影子模式实现真实驾驶数据的获取。在行驶过程中,传感器持续验证决策算法,一旦发现决策与驾驶员行为不一致,即触发数据回传,从而大幅缩小计算中心存储需求。
特斯拉通过影子模式搜集数据,经过清洗、标注(自动标注+人工标注),与仿真数据一起构建训练集。车载模型使用训练集进行训练,完成后更新到车上,形成数据流的闭环。
● 特斯拉算法的创新
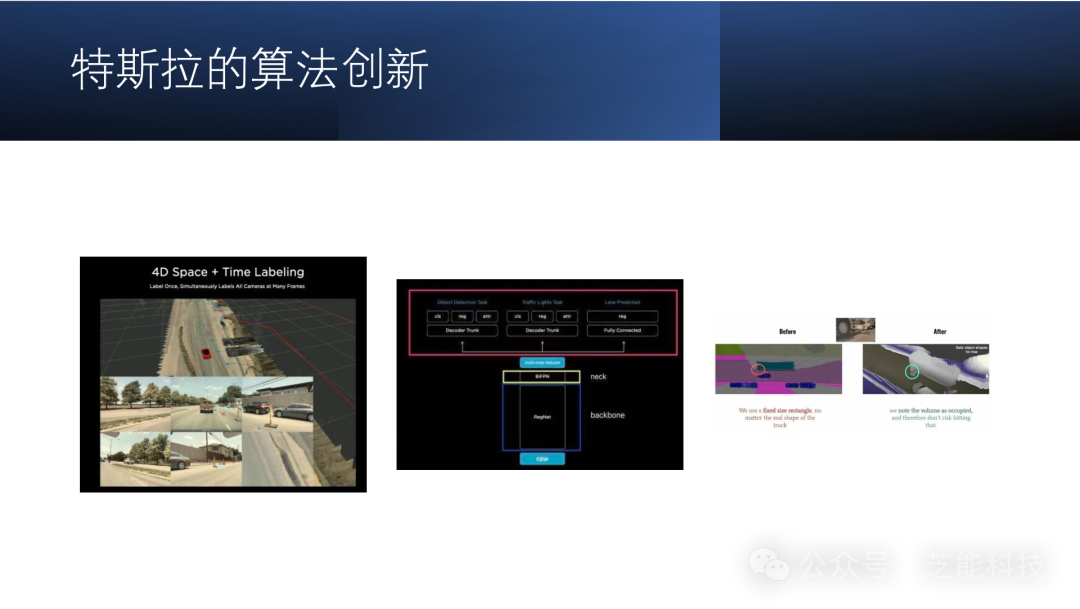
◎ 多任务学习神经网络架构HydraNet:特斯拉在2018年推出HydraNet结构,实现多任务学习,减少重复计算,提高算法效率,尤其在自动驾驶目标检测方面取得重要突破。
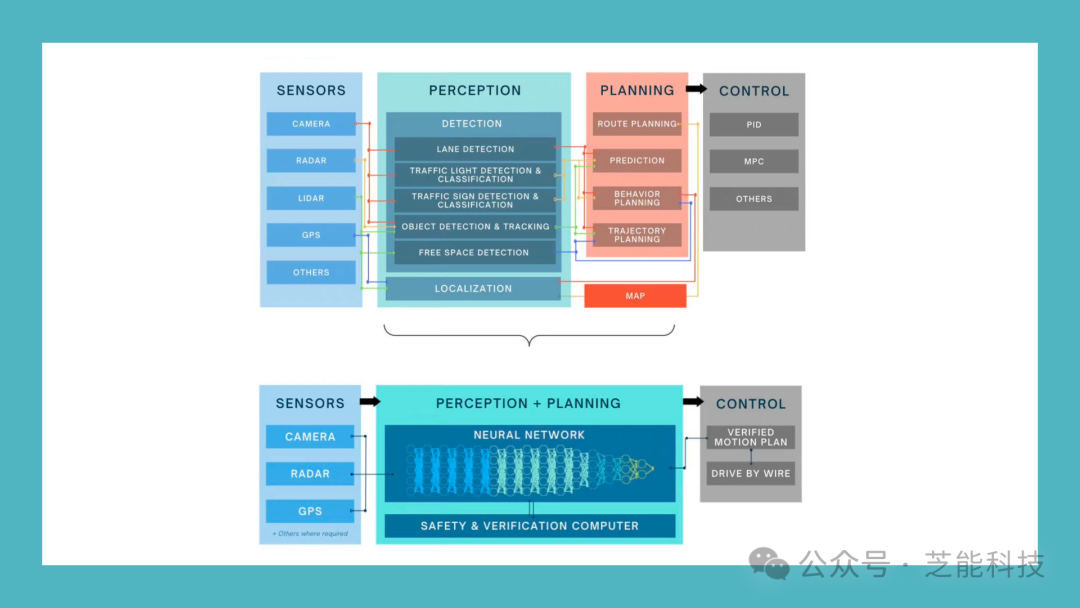
◎ BEV+Transformer:特斯拉引入BEV+Transformer架构,将2D图像升维为鸟瞰图,提升自动驾驶决策精准度且降低计算量,同时引入时空序列特征层,增加系统的推演能力。
◎ 占用网络:引入占用网络以解决现实世界的极端情况,通过预测每个体素是否被占用,简化算法逻辑,提升决策精确性。
端到端特斯拉在2024年1月推出FSD v12,将城市街道驾驶堆栈升级为端到端神经网络,通过深度神经网络实现对驾驶场景的直接处理,更接近人类驾驶。
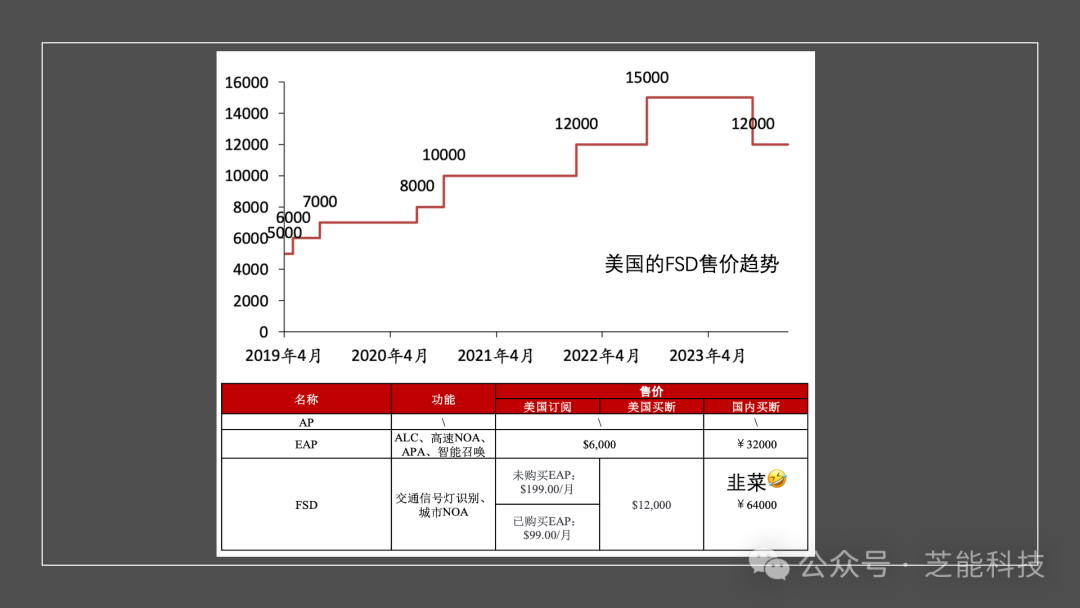
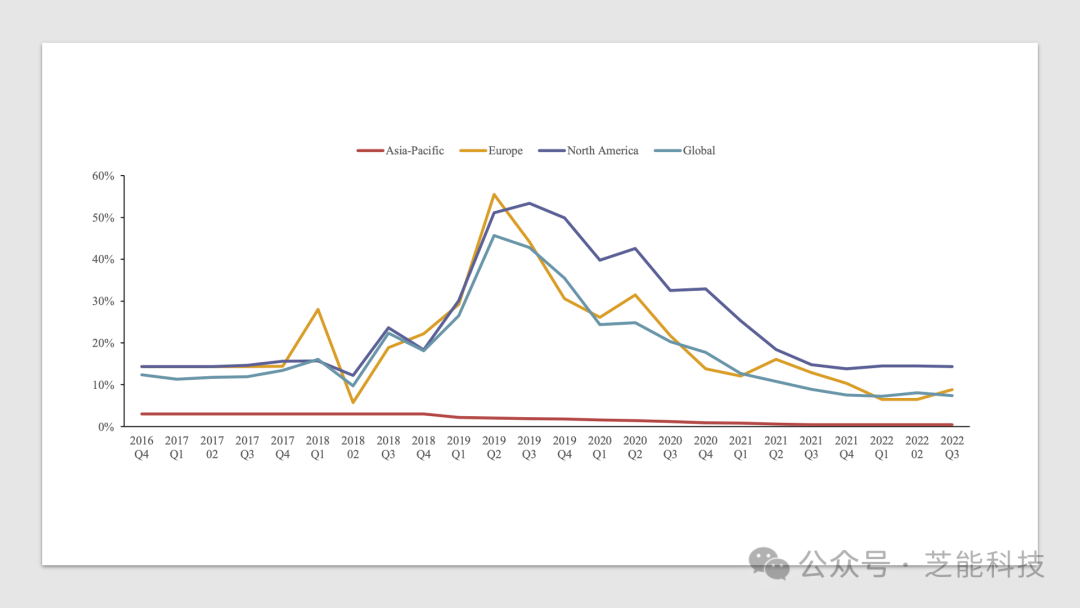
从目前来看,总体的付费率不是很高,还需要更多的努力。通过上面的迭代和创新,特斯拉在智能驾驶实现了软件付费模式的开拓,FSD在北美地区提供订阅和买断两种付费模式,通过持续提升FSD价格和宣传功能,成功推动了软件的销售。
特斯拉自动驾驶技术的不断演进与创新为整个行业树立了技术标杆,其硬件迭代、数据获取方式、算法创新以及软件付费模式的引领地位,使得特斯拉在自动驾驶领域占据着重要的地位。
 最前沿的电子设计资讯
最前沿的电子设计资讯

