e5jednc
在高速自动驾驶领域,L3级别的系统需要精确且可靠的传感器来确保在高速公路上的安全和高效运行。激光雷达作为关键传感器之一,性能直接影响车辆的环境感知能力。e5jednc
 e5jednc
e5jednc
● 安全是LiDAR设计的首要考虑因素,尤其是在高速公路驾驶环境中,必须能够准确检测到移动物体、不可跨越的障碍物,以及不可低于的障碍物,检测需求决定了LiDAR的分辨率、探测范围和帧率。对于高速行驶的车辆来说,高分辨率和长距离检测能力尤为重要,尤其是在视野中心的区域。e5jednc
● LiDAR的视野(FOV)和兴趣区域(ROI)是设计中的关键参数。中心视野的要求较高,因为这是车辆前进方向上的主要检测区域。通过动态调整激光能量集中于兴趣区域,可以提高特定区域的检测范围和分辨率。这种设计保证了在需要的地方有更高的检测性能,从而提高了行车安全性。e5jednc
LiDAR的安装位置也非常重要。常见的安装位置包括车前格栅、车顶、挡风玻璃后面以及车灯附近。每个位置都有其独特的优缺点,影响到LiDAR的视野、尺寸、环境适应性和清洁系统设计等因素。e5jednc
水平视野(HFOV)决定了其每帧可以捕捉的水平角度范围。对于高速公路驾驶,宽广的HFOV是必要的,这可以帮助车辆预测和追踪潜在的碰撞对象。尤其是在“切入场景”中,当一辆超车的车辆突然进入自车道时,LiDAR需要有足够宽的视野来检测到这类情况。
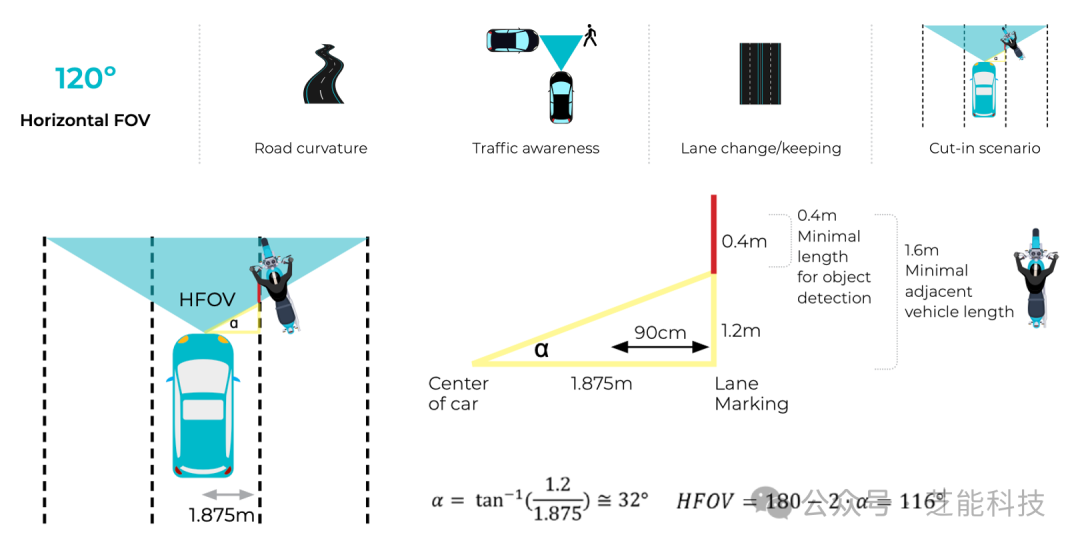 HFOV设计考虑主要包括:
◎ 安装位置:LiDAR安装在车辆前格栅处需要更大的HFOV,因为此位置检测到切入车辆的时间较晚。相比之下,安装在车顶时,LiDAR可以更早检测到切入车辆,因此需要的HFOV较小。
◎ 车辆宽度:宽度约为1.9米的自车需要至少120°的HFOV来确保可以检测到切入场景。
◎ 速度和反应时间:在130km/h的速度下,LiDAR需要在至少20帧每秒(FPS)的情况下工作,以确保在车辆反应之前能够准确检测到切入车辆。
水平视野的ROI(ROI HFOV)必须考虑到路面坡度变化、车辆加减速、风力及传感器方向校准误差等因素导致的变化。这些变化必须由ROI内的固定视野覆盖。为了满足基本场景理解的需求,还要求能扫描多车道和不同类型的弯道。
此外,还需要额外的视野作为缓冲,以允许工厂装配公差。ROI约为30°(含公差)。已知水平视野(HFOV)和最小检测距离100米,我们可以推算出车辆行驶速度为130公里/小时(80英里/小时)。
垂直视野(VFOV)定义了LiDAR在垂直方向上的捕捉范围。这对于检测道路表面的物体和前方的障碍物至关重要。在高速公路驾驶中,LiDAR需要能够检测到3米范围内的小物体,以确保车辆不会因为未检测到的障碍物而发生碰撞。
HFOV设计考虑主要包括:
◎ 安装位置:LiDAR安装在车辆前格栅处需要更大的HFOV,因为此位置检测到切入车辆的时间较晚。相比之下,安装在车顶时,LiDAR可以更早检测到切入车辆,因此需要的HFOV较小。
◎ 车辆宽度:宽度约为1.9米的自车需要至少120°的HFOV来确保可以检测到切入场景。
◎ 速度和反应时间:在130km/h的速度下,LiDAR需要在至少20帧每秒(FPS)的情况下工作,以确保在车辆反应之前能够准确检测到切入车辆。
水平视野的ROI(ROI HFOV)必须考虑到路面坡度变化、车辆加减速、风力及传感器方向校准误差等因素导致的变化。这些变化必须由ROI内的固定视野覆盖。为了满足基本场景理解的需求,还要求能扫描多车道和不同类型的弯道。
此外,还需要额外的视野作为缓冲,以允许工厂装配公差。ROI约为30°(含公差)。已知水平视野(HFOV)和最小检测距离100米,我们可以推算出车辆行驶速度为130公里/小时(80英里/小时)。
垂直视野(VFOV)定义了LiDAR在垂直方向上的捕捉范围。这对于检测道路表面的物体和前方的障碍物至关重要。在高速公路驾驶中,LiDAR需要能够检测到3米范围内的小物体,以确保车辆不会因为未检测到的障碍物而发生碰撞。
 VFOV设计考虑主要包括:
◎ 安装高度:不同的安装位置(如前格栅、车顶、挡风玻璃或车头灯)对VFOV的要求不同。安装在车顶时,LiDAR需要的VFOV较小,因为更容易检测到突出的物体,而前格栅安装则需要更大的VFOV。
◎ 检测距离:对于50厘米的安装高度,VFOV应在25°到40°之间,以确保能够检测到1.5米高度的装载物和低矮桥梁等可驱动的障碍物。
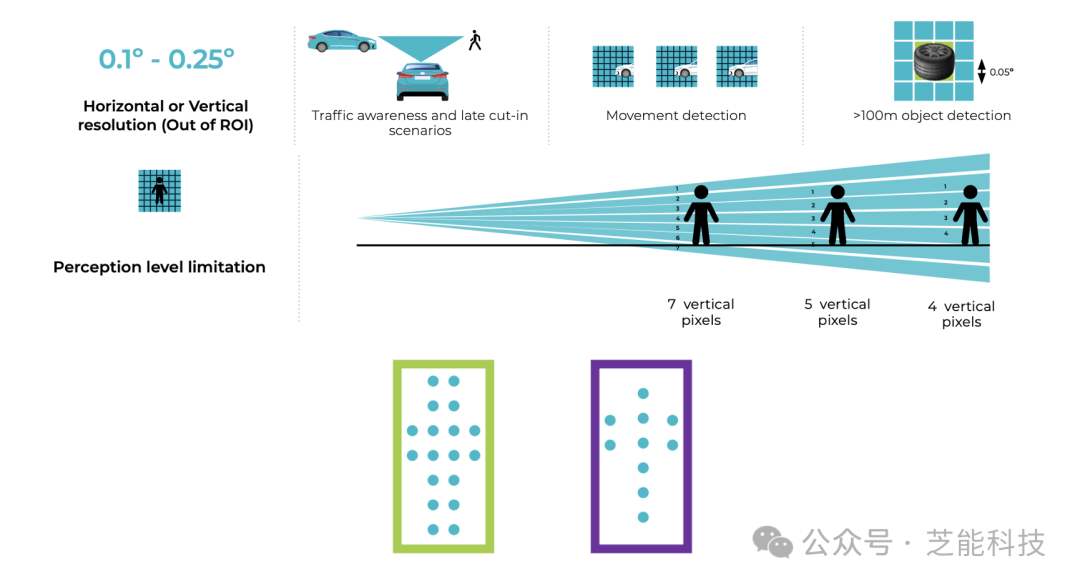
分辨率决定了LiDAR能够精确捕捉到的细节。高分辨率能够提供更精确的物体检测和分类能力,这是实现安全驾驶的关键。在L3级别的自动驾驶中,需要特别注意水平和垂直分辨率,以确保对远距离和近距离物体的准确检测。分辨率设计考虑。
◎ 水平分辨率(HRes):为了在150米距离内检测到行人,需要至少0.07°的水平分辨率。这可以确保在150米距离内,行人的宽度能够被2到3个像素检测到,从而实现高概率的正确识别和分类。
◎ 垂直分辨率(VRes):在100米距离内,LiDAR需要0.05°的垂直分辨率,以确保能够检测到14厘米高的物体。这对于避免车辆在高速行驶时因未检测到的障碍物而发生碰撞至关重要。
LiDAR的测量范围决定了其能够检测到的最大距离。在高速公路驾驶中,长距离的检测范围可以提供更长的反应时间,使车辆能够更平稳地行驶。舒适的驾驶体验需要LiDAR在至少200米的距离内检测到脆弱的道路使用者(VRUs),如行人和其他车辆。
◎ 环境条件:LiDAR的性能会受到环境光线、天气条件以及传感器老化的影响。因此,检测距离超过200米是可取的,以确保在各种条件下都能有效检测。
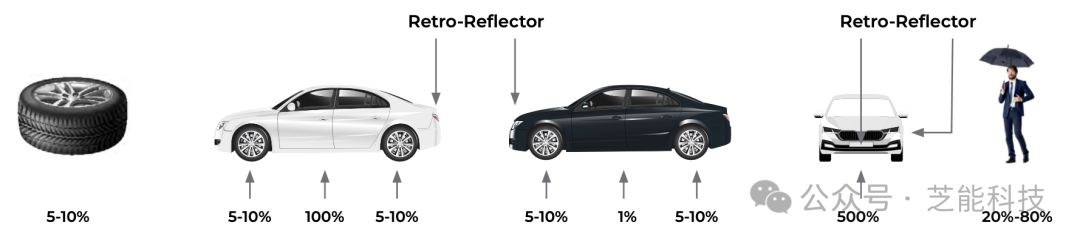
◎ 反射率:对于不同反射率的物体,LiDAR的测量范围会有所不同,在150米距离内,黑色金属车需要10%的反射率才能被检测到,而在50米距离内需要1%的反射率。
帧率定义了LiDAR每秒能够完全刷新所有像素的次数。较高的帧率可以提供更快的反应时间和运动检测能力。在L3级别的自动驾驶中,20帧每秒(FPS)是理想的帧率,可以确保在车辆快速移动时,能够准确检测和分类物体。
◎ 反应时间:较高的帧率可以减少反应时间,从而减少刹车距离。例如,20FPS的帧率可以在0.35秒内刷新所有像素,提供更快的反应能力。
◎ 检测精度:较高的帧率可以提高检测精度和可信度,确保在高速行驶时,车辆能够准确检测到周围环境中的所有物体。
综合考虑主要包括在设计L3级别的LiDAR系统时,必须综合考虑各项性能参数之间的相互关系。例如,较高的帧率可能会降低分辨率和视野范围,因此需要在各参数之间进行权衡和优化。
反射率数据通过测量每个像素收集到的光量生成。通过将该值与测量距离标准化,可以提取物体的反射率。这些信息有助于识别车道标记并改进对车辆和行人的分类。
在评估LiDAR时,需要同时考虑规格和参数,因为提高单个参数可能会对其他参数产生负面影响。例如,提高帧率可能会降低垂直视野和分辨率,在设计LiDAR系统时,必须综合考虑所有参数,以确保在不降低任何一项关键性能的情况下,实现最佳性能。
设计L3级别的LiDAR系统用于高速公路驾驶需要综合考虑水平视野、垂直视野、分辨率、测量范围和帧率等多项关键性能参数。每个参数都对LiDAR的整体性能和车辆的安全驾驶能力至关重要。
在实际应用中,需要权衡和优化各项参数,以确保LiDAR系统能够在各种环境条件下稳定、可靠地工作,从而提供安全、舒适的驾驶体验。
VFOV设计考虑主要包括:
◎ 安装高度:不同的安装位置(如前格栅、车顶、挡风玻璃或车头灯)对VFOV的要求不同。安装在车顶时,LiDAR需要的VFOV较小,因为更容易检测到突出的物体,而前格栅安装则需要更大的VFOV。
◎ 检测距离:对于50厘米的安装高度,VFOV应在25°到40°之间,以确保能够检测到1.5米高度的装载物和低矮桥梁等可驱动的障碍物。
分辨率决定了LiDAR能够精确捕捉到的细节。高分辨率能够提供更精确的物体检测和分类能力,这是实现安全驾驶的关键。在L3级别的自动驾驶中,需要特别注意水平和垂直分辨率,以确保对远距离和近距离物体的准确检测。分辨率设计考虑。
◎ 水平分辨率(HRes):为了在150米距离内检测到行人,需要至少0.07°的水平分辨率。这可以确保在150米距离内,行人的宽度能够被2到3个像素检测到,从而实现高概率的正确识别和分类。
◎ 垂直分辨率(VRes):在100米距离内,LiDAR需要0.05°的垂直分辨率,以确保能够检测到14厘米高的物体。这对于避免车辆在高速行驶时因未检测到的障碍物而发生碰撞至关重要。
LiDAR的测量范围决定了其能够检测到的最大距离。在高速公路驾驶中,长距离的检测范围可以提供更长的反应时间,使车辆能够更平稳地行驶。舒适的驾驶体验需要LiDAR在至少200米的距离内检测到脆弱的道路使用者(VRUs),如行人和其他车辆。
◎ 环境条件:LiDAR的性能会受到环境光线、天气条件以及传感器老化的影响。因此,检测距离超过200米是可取的,以确保在各种条件下都能有效检测。
◎ 反射率:对于不同反射率的物体,LiDAR的测量范围会有所不同,在150米距离内,黑色金属车需要10%的反射率才能被检测到,而在50米距离内需要1%的反射率。
帧率定义了LiDAR每秒能够完全刷新所有像素的次数。较高的帧率可以提供更快的反应时间和运动检测能力。在L3级别的自动驾驶中,20帧每秒(FPS)是理想的帧率,可以确保在车辆快速移动时,能够准确检测和分类物体。
◎ 反应时间:较高的帧率可以减少反应时间,从而减少刹车距离。例如,20FPS的帧率可以在0.35秒内刷新所有像素,提供更快的反应能力。
◎ 检测精度:较高的帧率可以提高检测精度和可信度,确保在高速行驶时,车辆能够准确检测到周围环境中的所有物体。
综合考虑主要包括在设计L3级别的LiDAR系统时,必须综合考虑各项性能参数之间的相互关系。例如,较高的帧率可能会降低分辨率和视野范围,因此需要在各参数之间进行权衡和优化。
反射率数据通过测量每个像素收集到的光量生成。通过将该值与测量距离标准化,可以提取物体的反射率。这些信息有助于识别车道标记并改进对车辆和行人的分类。
在评估LiDAR时,需要同时考虑规格和参数,因为提高单个参数可能会对其他参数产生负面影响。例如,提高帧率可能会降低垂直视野和分辨率,在设计LiDAR系统时,必须综合考虑所有参数,以确保在不降低任何一项关键性能的情况下,实现最佳性能。
设计L3级别的LiDAR系统用于高速公路驾驶需要综合考虑水平视野、垂直视野、分辨率、测量范围和帧率等多项关键性能参数。每个参数都对LiDAR的整体性能和车辆的安全驾驶能力至关重要。
在实际应用中,需要权衡和优化各项参数,以确保LiDAR系统能够在各种环境条件下稳定、可靠地工作,从而提供安全、舒适的驾驶体验。
责编:Ricardo









 最前沿的电子设计资讯
最前沿的电子设计资讯

